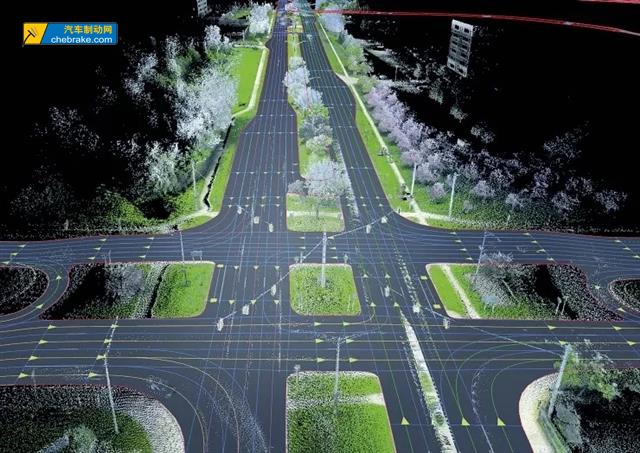
地图对自动驾驶的重要性不言而喻。有了高精度地图,就相当于给了无人驾驶车一个“上帝视角”,能配合感知进行更精准的判断。
清华大学汽车工程系主任杨殿阁教授表示:“在汽车实现真正的无人自动驾驶的时候,汽车实际上是行驶在一个动态的虚拟数字城市中,而这个数字城市就是控制无人驾驶汽车的真正的大脑,而
自动驾驶地图就是这个虚拟数字城市最核心的内容,所以说高精度的自动驾驶地图将是高级别无人驾驶实现的重要数据基础,是自动驾驶关键技术之一。
然而目前在国内,自动驾驶地图还不够完善,发展进度也很不理想。
汽车企业需要什么样的自动驾驶地图?地图厂商能提供什么样的地图数据和服务?自动驾驶地图数据是否能够支撑无人自动驾驶的需求?这些问题困扰着地图企业,同时也困扰着汽车行业。同时我们也看到,地图企业各自为战,每个人都在按照自己的技术路线和方式推进自动驾驶地图的工作。而与此同时,我们看到日本通过国家SIP项目组建DMP平台已经将地图企业和汽车企业联合在一起,共同推进统一数据格式的自动驾驶地图基础平台的建设,为自动驾驶基础数据的解决形成合力。”
清华大学汽车工程系主任杨殿阁教授
杨殿阁教授认为,“自动驾驶地图需要高精度的地理信息和环境数据,需要实时动态维护,与传统电子地图不同,未来面向全国范围的自动驾驶地图恐怕不是任何一家图商能独立完成的。而自动驾驶地图又是无人驾驶实现的必要数据基础,这就需要我们所有的图商联合起来,共建这个自动驾驶的关键数据基础,
而这也有可能是我们中国智能汽车自动驾驶发展过程中能自主掌握的最关键的杀手锏。”
为实现这一目标,中国汽车工程学会和清华大学正借助智能网联汽车产业创新联盟平台组建中国的“自动驾驶地图工作组”,在学会的指导下,清华大学汽车系正在负责工作组的组织和筹备和召集工作,在2018年的CICV年会上,拟由清华、百度、四维、高德、滴滴、光庭、千寻、上汽、一汽、东风、长安、北汽、宇通以及陕汽等联合发起工作组。
杨殿阁教授表示:
“自动驾驶地图工作组”重点的目标就是在图商和汽车企业之间搭建桥梁,让图商了解汽车企业的真正的需求,让汽车企业了解图商能够提供的服务,让供需双方真正结合起来。同时,联盟将通过工作组推动中国统一标准的自动驾驶地图数据格式规范,制定面向自动驾驶所能提供的统一的接口及数据内容服务行业和团体标准,为中国地图厂商的有效联手提供技术和标准支撑。
第五届国际智能网联汽车技术年会(CICV 2018)将于5月24-26日在宁波召开,
清华大学汽车工程系主任杨殿阁教授将主持“自动驾驶地图”分会场,传统地图企业、新锐地图企业、欧洲和美国的地图企业将会同台演讲,也吸引了众多整车企业参加,既包括传统的乘用车企业和商用车企业,也包括新兴造车势力。另外,备受关注的自动驾驶地图工作组也将在本次大会上宣布成立,大家将有幸一起见证自动驾驶地图国家队的诞生。
武汉光庭科技有限公司董事长朱敦尧教授:将会重点讲解自动驾驶对地图到底有哪些需求,以及如何基于地图做空间认知。
博世传感器产品经理郭大川将会重点介绍:在多传感器(视觉加毫米波雷达)匹配下,如何做定位,以及如何来做高精度地图的自动生成。
小鹏汽车互联网中心(上海)副总裁刘凡凡:将以造车新势力的角度,来谈谈用户到底需要什么样的地图数据。
千寻位置网络有限公司智能驾驶事业部总经理袁泽雁:将重点讲解高精度地图的定位服务。
北京四维图新智能地图事业部研发总监于立志:将重点介绍高精度地图在特定场景的表达和应用,对重点要素的高可靠性质量维护,同时也会介绍一下对未来地图生态的思考和建议。
欧洲HERE Technologies大中华区产品经理陈艳:将会介绍欧洲的地图规范,并重点介绍其最新的高精度地图产品,同时也会就传感器数据的分享发表看法。
美国DeepMap公司的产品总监Mr. Travis Bushnell:将会介绍美国的地图规范,并重点介绍DeepMap高精度地图的核心卖点,及其在美国的应用案例演示。
圆桌互动中的精彩碰撞,更值得期待
除了主题演讲外,本次大会还将安排圆桌对话,将充分探讨:
地图企业能提供什么样的地图,整车企业需要什么样的地图,双方之间如何实现无缝衔接?
主持嘉宾仍为杨殿阁教授,传统图商、新锐图商、乘用车企业、商用车企业、平台公司将会就此展开精彩对话,值得期待。参加互动的嘉宾包括:
刘凡凡先生,
小鹏汽车互联网中心(上海)副总裁
于立志先生,北京
四维图新智能地图事业部研发总监
谷小丰先生,
高德汽车事业群/新业务中心/高精度图产品总监
谢国富博士,
Momenta研发总监
王钊博士,
陕西重型汽车有限公司汽车工程研究院智能服务研究所所长
百度(具体人员待定)
本次圆桌对话的子议题:
1、自动驾驶需要什么样的地图?
2、自动驾驶地图公共服务平台。
3、自动驾驶地图精度与插件。
4、自动驾驶地图与高精度定位。
CICV2018
第五届国际智能网联汽车技术年会
国际智能网联汽车技术年会(CICV)经过4年的发展,已经成为智能网联领域最具国际视野、最先进技术研讨、最全面专题覆盖的权威会议。
CICV2018由中国汽车工程学会、清华大学苏州汽车研究院、上海国际汽车城、中国智能网联汽车产业创新联盟主办,由清新汽车、中汽翰思、上海国际汽车城开发服务有限公司协办。
主要亮点
1000+参会嘉宾代表
60+技术演讲
7场互动讨论
10+企业展示智能汽车传感器、自主决策、智能控制、开发测试等技术和产品
主要议题
基于SCSTSV理念的中国标准ICV
智能网联汽车产业化的挑战及应对
环境感知和智能控制
车载网络架构和信息安全
V2X及智能网联交通
人工智能与自动驾驶
智能网联汽车的测试、评价和示范
自动驾驶与自动驾驶地图
智能网联时代下人才的培养及输送路径