如果这辆车在耶路撒冷都能开了,那就(几乎)能在任何地方开了
近日,英特尔-Mobileye在耶路撒冷展开自动驾驶车队测试,展示了Mobileye的先进技术,以下为英特尔公司高级副总裁英特尔子公司Mobileye公司首席执行官兼首席技术官Amon Shashua教授发表发表的评论文章:
英特尔与Mobileye的百辆自动驾驶汽车已经在耶路撒冷开始第一阶段的测试。测试路段行车艰难、极具挑战性。此次上路测试展示了Mobileye的先进技术,证明了责任敏感型安全(RSS)模型可以提升安全性,并将关键学习成果融入到产品和客户项目中。预计数月内,测试车队将进入美国和其它地区。虽然我们的自动驾驶车队不是第一个上路测试的车队,但它代表了我们在多个领域采用的全新理念,并且有别于传统技术。凭借在计算机视觉和人工智能领域积累的二十多年的经验,我们的测试汽车证明,英特尔和Mobileye的解决方案是目前极行之有效的方案。
与其它自动驾驶系统相比,我们的关键之处在于,系统在设计之初,就将安全性、经济性和可扩展性作为重要目标。具体而言,自动驾驶汽车要比手动驾驶汽车速度更快、更顺畅,而且成本更低;它能适应任何地理环境;比人工驾驶的安全水平要高出一千倍,无需在公共道路上进行数十亿英里的验证测试。
为什么选择在耶路撒冷开展测试?
很显然,Mobileye公司就在以色列。一方面,选择耶路撒冷十分方便开展驾驶测试;而另一方面,这可以证明,我们的技术足以挑战任何地理环境和道路环境。耶路撒冷因行车艰难而出名:道路标识不清,变道环境复杂,行人不遵守交通规则。自动驾驶汽车的车速不能太慢,这样容易造成交通堵塞或引发交通事故。相反,自动驾驶车必须像当地驾驶员一样自信驾驶、果断决策。
在这种环境下,我们在测试自动驾驶汽车和技术的同时,也可以改进驾驶策略。驾驶策略也称为规划或决策。好的驾驶策略让自动驾驶汽车设计上的诸多困难迎刃而解。通常,很多目标有待优化,部分目标又彼此矛盾。比如,如何确保极致安全,而又不过度谨慎;如何模拟手动驾驶风格(以免吓到其他驾驶员),又不造成人为错误。为了更好地平衡这些因素,车队采用两套独立的系统,一套下发驾驶指令,另一套批准或拒绝指令。目前,这两套系统都运行稳定。
↑
英特尔及其子公司Mobileye于2018年5月17日宣布,百辆自动驾驶车队已在耶路撒冷开始第一阶段测试,以展示英特尔实现自动驾驶安全的方法。
安全驾驶vs果断决策
我们对驾驶决策系统中的指令发出模块进行离线训练,以形成果断、流畅和拟人化的驾驶风格。我们公司使用的这套软件是基于AI强化学习技术开发出的。该系统也是车队的最大亮点,各种场景指示也让我们为之振奋。然而,自动驾驶汽车的“驾驶员”也要清楚且果断地判断与危险驾驶之间的边界点。为了达到这一目的,我们采用责任敏感型安全(RSS)模型来控制AI系统。
RSS模型将安全驾驶的基本原则转化成机器可以理解的数学公式。例如,尾随其他车或变道时的安全距离、道路优先权和障碍物避让等。如果AI系统发出的指令违反了任何一条基本原则,RSS将拒绝该指令。
简而言之,基于AI的驾驶策略系统,其职责是让自动驾驶汽车行驶到目的地,而RSS模型则负责保障沿途的驾驶安全。安全性靠系统设计进行保障,无需进行数十亿英里的道路测试。车队目前使用Mobileye的安全系统,相关方法已公开分享,并期望在与其它公司合作的过程中,形成技术中立的业界领先标准(中立指该系统适用于任何汽车制造商的驾驶策略)。
为何感知系统只有摄像头?
在初始阶段,车队的感知系统只配备了摄像头。在360°全景系统中,每辆车配备了十二个摄像头,其中,八个摄像头探测远距离环境,另外四个用于泊车。这个阶段的目标是想证明,仅依据摄像头获取的信息,就可以形成端到端的自动驾驶方案。该方案中,环境感知系统通过俯视图来呈现行驶汽车周围的环境状态,能够识别车辆和行人、道路标志和交通信号灯的含义,能够实时创建高清地图并帮助汽车做精确到厘米级的定位,能够进行道路规划(即驾驶策略)和车辆控制。
↑英特尔和Mobileye自动驾驶汽车上分立式安装了十二个摄像头,能提供360视角并进行远距离环视和停车。
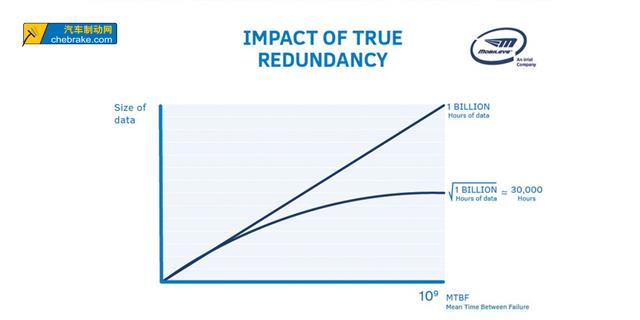
初始阶段是为了实现感知系统的“真正冗余”。“真正冗余”是指,感知系统包含多个独立工作的子系统,每个子系统都可以独立支持自动驾驶。而之前的感知系统,则是将不同来源的原始传感器数据整合在一起,实际上,只有一个传感系统。“真正冗余”有两个主要优势:首先,感知系统验证所需的数据量大大降低(十亿小时的平方根VS十亿小时),如图A所示;其次,如果其中一个子系统故障,车辆可以继续安全行驶。如果采用数据整合的传感系统,则需立即停车。数据整合传感系统就好比一串圣诞树彩灯,如果一个灯泡坏了,那么,整串彩灯也就坏了。
↑“真正冗余”的作用(注:
此图从“平均无故障时间”(MTBF)测试角度对上述两种系统进行比较。这里的故障是指,任何一个可能导致死亡的传感器故障。Mobileye的目标,是把MTBF提高到十亿小时,比手动驾驶汽车的安全标准高一千倍。单传感器系统需要收集约十亿小时的数据来测试MTBF,而“真正冗余”感知系统则只需收集大约三万小时的数据(十亿小时开平方)。此外,“真正冗余”感知系统可以在实验室进行MTBF测试,无需到实际驾驶环境中收集数据。)
未来几周,我们会在系统开发的第二阶段,加入雷达/激光雷达传感设备,通过不同的传感模块之间的协同作用,来提升驾驶的“舒适性”。
当前及未来的计算平台硬件
自动驾驶车队的端到端计算系统安装了四颗Mobileye EyeQ®4芯片。该芯片功率为六瓦,在八位深度网络上,提供每秒2.5万亿次运算(TOP/s)的计算能力。EyeQ4是Mobileye最新推出的系统级芯片,于2018年生产。Mobileye计划,今年再推出四款芯片,2019年推出十二款芯片。根据公司规划,EyeQ®5支持全自动驾驶,在今年晚些时候,就可以推出工程样品。EyeQ5提供二十四万亿次运算的能力,比EyeQ4强约十倍。我们计划,为一辆L4/L5阶段的全自动驾驶汽车,配备三颗EyeQ5芯片。因此,2019年初推出的新一代EyeQ5的计算能力,将是目前EyeQ4芯片的十倍。
英特尔和Mobileye采用的方法不同于业界常用的方法。业界在研发中往往超额订购计算需求,比如,要求“在产品开发中给我无限的计算能力”,然后,再尝试进行成本和功耗优化。而我们则使用更有效的策略,来减少计算需求,从而聚焦于开发最有效的算法--用于状态感知、驾驶策略制定和车辆控制。
前路漫漫,但我依然为Mobileye和英特尔的开发团队感到无比的自豪,感谢他们的努力工作和取得的重大突破。我们的目标是:在客户的支持下,这套系统在2021年进入批量生产并应用于L4/L5阶段自动驾驶汽车。