自动驾驶车辆想要在路上安全行驶,首要的是能够准确感知周围环境,如车辆、行人、交通标识等,需要搭载多种传感器,包括摄像头、毫米波雷达、LiDAR(激光雷达)等。不同传感器的原理和功能各不相同,能在不同场景中发挥各自优势,目前难以相互替代。本文将在此基础上进一步梳理相关传感器代表企业和其技术及产品研发。
1,摄像头
博世:第三代前置摄像头
◆摄像头功能安全等级提高到ASIL-B。
◆运用人工智能算法:卷积神经网络算法。
◆将密集光流检测和纹理检测结合,为未来L4以上的自动驾驶做好准备。
博世目前生产的摄像头传感器是按照ADAS等级的需求而设计,面向未来的自动驾驶,博世正在开发第三代前置摄像头。第三代前置摄像头分为单目和双目,是具有革命性意义的产品。
首先,像素提高到200万,同时支持的最大水平视角达到了正负50°,在75m范围内都可以通过立体视觉产生视差进行空间检测,技术核心是摄像头功能安全等级提高到ASIL-B;其次,应用密集光流检测法,该系统可识别路边打伞的目标人群,能清晰地做好轮廓区分;同时,运用人工智能算法,将卷积神经网络算法集成在SOC(服务器操作中心)上,加强对物体的检测,区分路上目标哪些是人、哪些是车、哪些是可通行区域、哪些是道路标志线等,即使在复杂工况下,也可做到高准确度的检测;此外,将密集光流检测和纹理检测结合起来,为未来L4以上的自动驾驶做好准备,最高可支持800万像素传感器,以及支持红绿灯的检测。
大陆:第五代摄像头MFC500
◆加入深度学习算法。
◆拥有800万像素和125°广角。
◆具备模块化、可扩展和互连性等特征。
大陆集团针对智能驾驶推出了第五代摄像头MFC500,它在前一代摄像头技术上加入深度学习算法,从而提高车辆的环境感知、驾驶路径规划及运动控制能力。
MFC500的深度学习方法具有可拓展性,这意味着更多的数据、更强的计算能力和更高的性能。据悉,MFC500多功能摄像头将于2020年量产,其分辨率最高可达800万像素,并具有125°广角,可更早地探测到交叉车流中的物体。
此外,MFC500最重要的特征还有模块化和互连性,其硬件与软件能够通过神经网络处理从简单的物体探测,到快速的复杂情况分析等一切实现自动化驾驶的任务。
麦格纳:EYERIS®摄像头技术
◆提供逼真的360°全景的环境图像。
◆将集成时间按和开发成本降到最低。
麦格纳EYERIS®摄像头技术包含多项功能,如拖车辅助、自动泊车、行人检测和环视功能。该技术的一项最新应用是一款3D全景环视系统,用于停车或低速行驶时给驾驶员提供辅助。驾驶员可以通过简单易用的界面来调整显示周围环境的视角画面;当在行驶道路上探测到障碍物时,系统将对驾驶员发出警报。
该系统为驾驶员提供了逼真的360°全景的环境图像,并大幅提升了现有的泊车辅助系统所提供的鸟瞰图质量。这项即时可用的创新技术将集成时间按和开发成本降到最低,使之成为了汽车制造商的简单、经济、高效的选择。
2,毫米波雷达
博世:第五代毫米波雷达
◆第五代毫米波雷达带宽提高到1.5个G。
◆应用先进的技术原理进行无线电波调频,满足对多复杂目标高准确性的探测要求。
博世计划在2018年、2019年推出第五代毫米波雷达,在2021年左右推出至尊型毫米波雷达,这是为L3高速段以上开发的雷达。与第四代对比,第五代毫米波雷达不仅是带宽从1个G提高到了1.5个G;同时也大大拓展了雷达可占用带宽,实现更高的反射量。第五代毫米波雷达对于很多目标,比如卡车,它的反射点会更多,同时对道路边界的静止目标将获得更多反射还原,以实现更准确的环境建模。
尤为值得一提的是,博世应用了先进的技术原理进行无线电波调频,可以满足博世对多复杂目标的高准确性探测要求;同时,也应用了先进的天线发射方式以实现更长的角度和精度。
海拉:77GHz雷达传感器
◆RF-CMOS工艺实现紧凑化设计。
◆雷达传感器的自我诊断系统,这是实现高度自动驾驶的重要先决条件。
早在2005年,海拉就将其第一代24GHz雷达传感器投入批量生产,这也是ADAS的重要传感设备。同时,海拉正在利用模块化平台的方法研发24GHz雷达传感器,这有助于海拉实现将驾驶辅助系统应用于大众市场这一目标。
面向未来的自动驾驶,77GHz雷达技术将变得越来越重要。海拉的77GHz雷达传感器的核心射频芯片是基于RF-CMOS工艺,其不仅具有射频收发模块,还高度集成了具有连续数字信号处理的带有自诊断的单片微波集成电路。这不仅可以实现紧凑化设计,为传感器的安装提供新的可能,诸如安装在车身侧面内部,以便于传感器能360°无死角地识别整辆汽车周围的环境,从汽车、骑自行车的人到行人,这在自动泊车中尤其重要;同时,雷达传感器的自我诊断系统一直监控所有功能的运行情况,这是实现高度自动驾驶的重要先决条件。
麦格纳:ICON RADAR高清雷达
◆美国军用技术血统。
◆探测距离超过300m且4D扫描。
◆具备顶尖的成像能力和极强的抗干扰能力。
麦格纳的ICON RADAR采用了美国的军事技术,具有环境探测精准、探测范围广和弹性高的特点,成为了高分辨率汽车雷达一个新的标杆技术。其探测距离超过300m,能以比人类眨眼快50倍的速度在距离、高度、深度和速度4个维度持续扫描四维空间环境,探测并追踪的物体数量比同类竞品多100多倍,并且能对探测物逐一分类。
同时,ICON RADAR能探测车辆周围不同的静态物体,比如护栏、路面杂物和减速带等,并与车辆进行信息交互;它还能追踪大量的移动物体,比如车辆、骑行者、行人和宠物等。
ICON RADAR具备顶尖的成像能力和极强的抗干扰能力,它将数据从192个虚拟接收器中融汇并入一个小巧的系统中,使分辨率精度达到了一个新的高度。
此外,ICON RADAR尺寸紧凑,为汽车外观的设计提供了极大的灵活性,易于集成到汽车厂商的自动驾驶系统中,或者是集成在麦格纳的MAX4自动驾驶平台上。
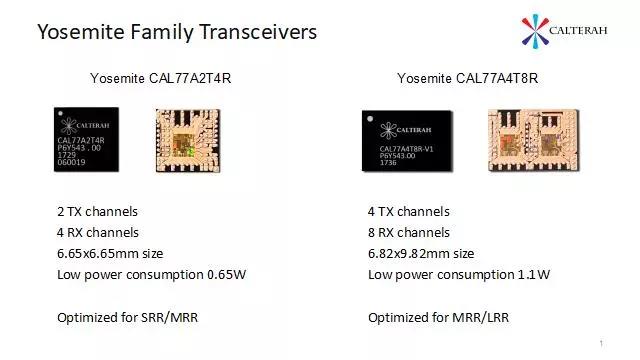
加特兰:77GHz毫米波雷达芯片
◆高集成和低成本。
◆实现了业界最小的芯片功耗和芯片尺寸。
2017年10月,加特兰微电子科技量产发布了业界首款基于CMOS工艺的77GHz毫米波雷达射频前端单芯片Yosemite。该芯片的创新首先在于材料和工艺的突破,带来最大的两个优势--高集成和低成本;同时,Yosemite实现了雷达系统射频前端的全集成,降低了板级设计难度,提高了射频系统的批量稳定性和一致性;更重要的是,CMOS半导体工艺带给芯片巨大的批量成本优势;此外,通过电路设计的创新,Yosemite芯片的功耗指标低至业界同类产品的1/3-1/2,实现了业界最小的芯片功耗和芯片尺寸,而这对于下游客户来讲都是实实在在的“好处”。
Yosemite芯片自发布后,广受市场欢迎与认可。截至目前,已经有数十家客户测试评估,帮助十多家客户完成产品开发,其中包括tier1厂商、雷达模块制造商等。终端市场覆盖乘用车前装、商用车前装、商用车后装等。
3,激光雷达
法雷奥:SCALA激光扫描仪
◆探测距离可达150m,探测视野达145°。
◆为周围环境创建3D地图,确切探测障碍物。
法雷奥SCALA激光扫描仪是目前市场上首款也是唯一一款量产的车规级激光雷达,具有价格优势。SCALA能够探测静止及移动物体,其探测距离可达150m,探测视野达145°,是自动驾驶汽车的核心部件。该技术通过为周围环境创建3D地图,可以确切探测障碍物,并对车辆进行精准定位,以确保车辆的整体安全。
2018年消费电子展(CES)上,法雷奥投资的法国Navya公司推出纯电动无人驾驶出租车Autonom Cab,其安装了7个法雷奥SCALA激光扫描仪。
大陆集团:高清三维激光扫描雷达
◆可捕获并处理实时三维机器视觉。
◆以高于50次/s的速度生成环境模型。
大陆集团正致力于打造下一代环境模型,其研发的高清三维激光扫描雷达能满足监测汽车外围环境的严格要求,可捕获并处理实时三维机器视觉,不含任何机械组件。要处理和分析的数据量越大,需要的计算能力就越高,因此需要更强大的控制单元来构建和管理环境模型。环境模型表示各个传感器和不同应用之间的中间软件层。该层含有数据融合和预期设入的算法,旨在增强精度和可靠性,扩大各个传感器的视野,充当不同功能的抽象层。
大陆集团的辅助和自动化驾驶控制单元将用作评估和解释所采集信息的核心点,以高于50次/s的速度生成环境模型。高清三维激光扫描雷达是生成完整的三维环境模型的核心组件。据了解,大陆集团计划于2020年开始批量生产此产品。
4,传感器融合
博世:域控制器
◆搭载自动驾驶L2、L3需用的中央行车大脑。
◆在L3及未来的L4城市引导上,提供超强能力的域控制器。
博世预计在2019年底向市场上推出量产的域控制器,搭载了自动驾驶L2、L3需用的中央行车大脑。在高速公路引导的高速段(L3)及未来的L4城市引导上,提供超强能力的域控制器,引入在基础底层、特征层面运算所需要的硬件加速,不排除像GPU硬件加速的芯片,提高域控制器的运算能力。
伟世通:DriveCore™
◆计算能力扩展性强。
◆运算能力覆盖500GFLOPS-20TFLOPS。
◆加速基于传感器的人工智能算法的开发。
伟世通的DriveCore™是一款安全可靠的域控制器,计算能力扩展性强,可以整合多个摄像头、激光雷达、雷达传感器的数据。
DriveCore™有三大组成部分:Compute是一个模块化、可扩展的硬件计算平台,很容易适应各级自动驾驶技术的要求;Runtime提供的安全框架,使应用程序与算法能进行高性能的实时通信;Studio是基于PC的开发环境,它使汽车制造商可以为算法开发人员搭建生态系统,加速基于传感器的人工智能算法的开发。DriveCore™是业内首款开放协作的平台,提供强大的信息处理能力和先进开发软件,促使自动驾驶系统的快速发展。
法雷奥:XtraVue超级视距
◆让驾驶员对道路状况一目了然。
◆整合复杂数据,呈现直观影像。
法雷奥XtraVue超级视距集成了安装于车身的远程通讯天线、激光扫描仪和法雷奥摄像系统。它能让驾驶员对道路状况一目了然,甚至包括视野之外的路况;同时能将其它互联车辆拍摄的流视屏和道路基建设施摄像头拍摄的影像呈现在车内显示屏上。
得益于现有公共4G网络及车与车之间(V2V)互联网络的发展,这种技术能够将这些复杂的数据整合在一起并且呈现出直观的影像,提升车辆驾驶的视野范围。对驾驶员而言,他们就好像具备了透视前方障碍物的能力,让驾驶行为更加安全。