《车路协同自动驾驶系统(车路云一体化系统)协同发展框架》发布
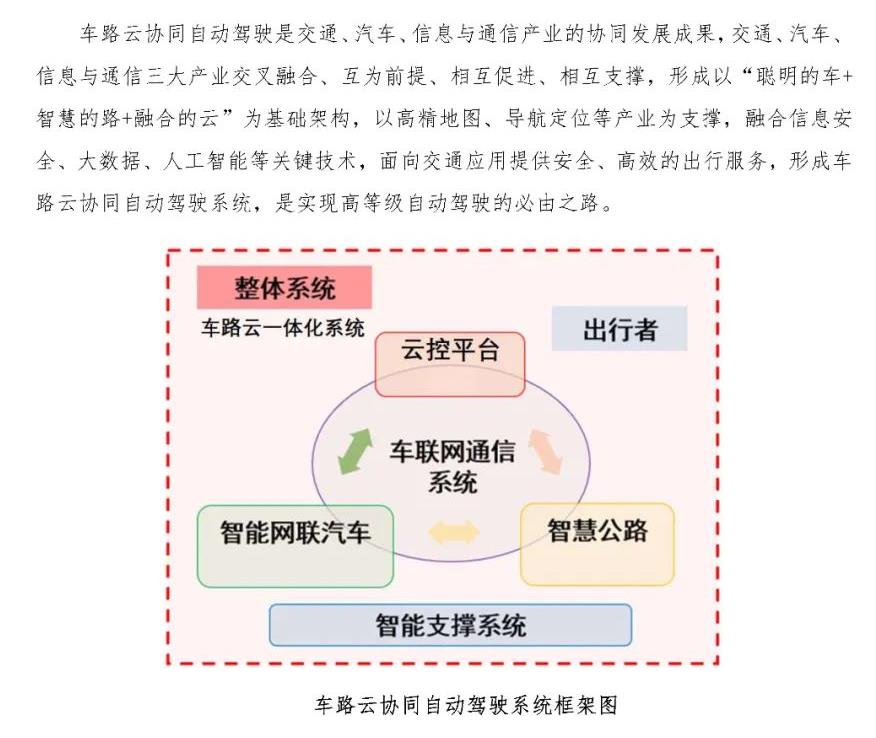
1月16日,中国公路学会、中国汽车工程学会和中国通信学会联合发布《车路协同自动驾驶系统(车路云一体化系统)协同发展框架》指出,形成车路云协同自动驾驶系统是实现高等级自动驾驶的必由之路。
此次,中国公路学会、中国汽车工程学会和中国通信学会共同编制了《车路协同自动驾驶系统(车路云一体化系统)协同发展框架》,旨在加快推进我国车路协同自动驾驶的科学研究及产业技术创新,引领并推进我国智慧公路、智能交通和智能网联汽车、现代通信产业发展,助力“交通强国”“科技强国”“数字中国”战略目标的早日实现。
作为国内自动驾驶的头部企业,百度也一直高度重视并全面布局车路协同自动驾驶,先后参与多项相关国家标准制定,率先推出Apollo Air计划,率先开源了全球首个车路协同数据集DAIR-V2X,并在2022年12月23日,清华百度等联合发布全球首份车路协同自动驾驶技术创新白皮书《面向自动驾驶的车路协同关键技术与展望》升级发布2.0版,积极投身车路协同自动驾驶系统协同发展的实践与应用中。
为实现车路协同自动驾驶系统协同发展的应用落地,中国公路学会、中国汽车工程学会和中国通信学会联合建议如下:
1、坚持车路云协同发展,制定统一技术发展路线图
2、突破具体场景,推进产业落地发展
3、加强标准协同,支撑跨行业融合发展
4、坚持跨部门协同,加强跨产业协同创新
5、加大政策支持力度,推动C-V2X路侧设备覆盖率和车端渗透率