随着人们对车速要求的不断提高,车辆行驶的稳定性变得越来越重要,根据美国的调查显示,翻车是造成商用车事故的重要原因。列车6%的事故是翻车事故,其中50%以上的翻车事故会导致人员伤亡,每次翻车事故造成的平均经济损失达12万美元,每年由翻车事故造成的工业损失达13亿美元,社会损失则更高。为了有效避免翻车事故,提高车辆稳定性,威伯科公司开发出了用于商用车的电子稳定控制系统(Electronic stability control,简称ESC或者Electronic stability program,简称ESP)该系统是基于电子制动系统(Electronic brake system,简称EBS)基础上的车辆稳定控制系统。同时,为使更多的商用车能够实现电子稳定控制,威伯科公司又开发出了基于汽车防抱制动系统(Antilock Braking system,简称ABS)而拓展出的商用车稳定控制系统,为车辆实现稳定性控制提供了更多的可能。本文将系统介绍威伯科公司基于ABS E代的基础上拓展出的电子稳定控制系统。
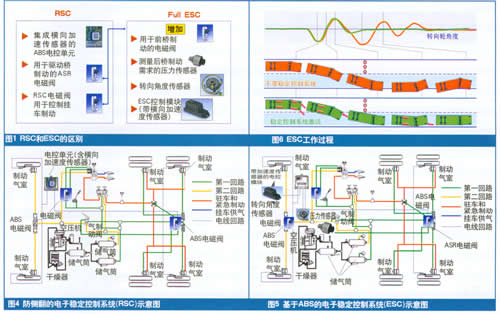
威伯科基于ABS E代拓展出的电子稳定系统分为两种,一种是防侧翻电子稳定系统(Roll stability control,简称RSC),它主要作用于高附着系数路面,相对成本较低,而且也较容易实现。另外一种是电子稳定控制系统((Electronic stability control,简称ESC),它是一种全功能的电子稳定控制系统,不仅包含防侧翻电子稳定系统,还具备了纠正车辆转向的能力,覆盖了低附着系数路面的工作情况,让车辆行驶更安全也更稳定。RSC和ESC区别见图1。
基于ABS的防侧翻电子稳定控制系统
(Roll stability control,简称RSC)
在高附着系数路面上,翻车通常都是由于在转向时车速过高造成车辆横向加速度过大而导致的。如图2所示,当车辆在转向过程中,由于离心力(FIat)的作用,车辆产生横向加速度过大时,就会导致翻车。
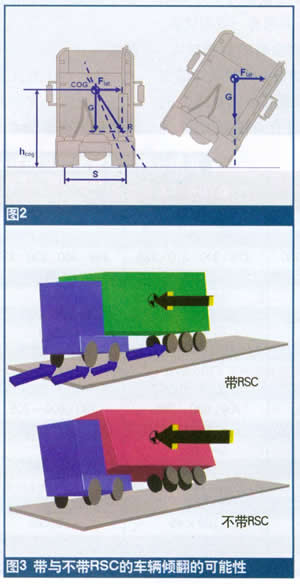
当横向加速度接近临界点时,驾驶员通常无法及时感知这一危险,往往无法避免翻车事故的发生。防侧翻RSC示意图见图4,在ABS电控单元集成了一个横向加速度传感器,这个传感器随时测量车辆相应的横向加速度,并计算临界加速度限制,当横向加速度接近这一临界点时,系统就会激活原有的ASR电磁阀和驱动桥的ABS电磁阀,从而对驱动桥进行制动,以使车辆减速,同时对于带挂车的牵引车,系统将激活额外的一个电磁阀,对挂车控制阀输出制动信号,从而对挂车进行减速。系统控制过程如图3所示。另外,RSC系统还会通过SAE J 1939 CAN总线控制发动机和缓速器的输出扭矩,从而有效的避免翻车事故的发生。
基于ABS的电子稳定控制系统
(Electronic stability control,简称ESC)
当车辆处于低附着系数路面时,不仅要面对横向加速度过大的危险,还要面对不足转向或者过度转向的危险。对于带挂车的列车而言,更有折叠的危险。如图5所示,相对于RSC系统而言,ESC系统会在车辆在低附着系数路面上转向时,系统不仅像RSC那样监测车辆的横向角速度,在出现翻车危险时通过对驱动轮和挂车进行制动,并通过CAN总线控制发动机和缓速器输出扭矩,以降低车速,从而避免翻车。同时更增加了带角加速度传感器的ESC控制模块.通过这个控制模块不断监测并计算车辆的角加速度,并与安装在转向管内转向角度传感器测得的转向机转向角度相比较,当两者出现差异时,通过ABS电控单元激活安装在前桥的电磁阀和相应的前桥ABS电磁阀对转向轮进行制动,以纠正车辆不足转向或者过度转向的情况,从而让车辆在低附着系数路面上更易控制。不仅如此,在制动回路中增加的压力传感器还能精确的测量制动压力输出的大小,从而实现更准确的控制。同时由于这个压力传感器的存在,也使这个系统同时具备了电子制动力分配(Electronic Brake forceLimitation,简称EBL)功能。
ESC的工作过程如图6所示,当车辆在低附着系数路面上避让障碍物时,不带稳定性控制系统的整个过程如图中红色车辆所示,整个过程中转向轮角度调整非常大,但仍然无法避免车辆滑出车道,而且整个过程中车辆也有折叠的危险。当稳定性控制系统激活时,如绿色车辆所示,整个过程.转向轮角度调整不大,和在正常道路上避让障碍物的调整情况类似。车轮上的红色箭头表示该车轮的制动情况。整个过程中,首先当车轮转向变道时,系统监测横向加速度,对车辆所有车轮进行制动,以降低车辆横向加速度,防止翻车,接着当驾驶员向左转向时,由于路面附着系数低,车辆出现不足转向,系统对左侧转向轮进行制动,以纠正车辆的不足转向,帮助车辆进入正确行驶车道,防止车辆滑出车道,出现危险。当车辆进入车道后,还是由于路面附着力不够,而导致了车辆向左过度转向,这时根据ESC控制器中的角加速度传感器和转向管内的转向角度传感器测得差异,对车辆右侧转向轮进行制动,使车辆完成整个避让过程,回复到直线行驶状态。从图6所示的两个相同的避让过程中,显而易见的,由于电子稳定控制系统的介入,在这种湿滑道路情况下,让驾驶员对车辆的操纵变得更容易,也让整个过程更安全。
威伯科公司始终致力于各种安全系统的开发,让我们的车辆行驶更安全!