郭建华 初亮
吉林大学
刘明辉 魏文若
中国第一汽车集团公司技术中心
[摘要] 基于模糊控制理论设计了一种模糊自适应ESP控制器,该控制器可根据反馈的车辆状态信息自动适应车速和路面附着系数的变化。采用Matlab/Simulink建立了14自由度车辆模型和控制器模型,考虑了轮胎的非线性特性对汽车转向特性与行驶稳定性的影响。仿真结果表明,该控制器能够提高汽车在高速或光滑路面上的操纵稳定性,有较强的适应性和鲁棒性。
[主题词] ESP 模糊自适应控制 操纵稳定性 模型
1 前言
ESP是在汽车防抱死制动系统(ABS)和牵引力控制系统(TCS)基础上发展起来的一种汽车主动安全系统,该系统通过传感器测量转向盘输入角、横摆角速度、侧向加速度和轮速,由ECU计算出驾驶员期望的行驶轨迹和汽车运动状态并对路面状况进行识别,通过控制汽车牵引力和对相应车轮施加制动使车辆在极限工况下仍能保持稳定,显著提高了汽车的操纵稳定性和行驶安全性。
传统的ESP一般是基于横摆角速度和质心侧偏角的PID反馈控制。近几年来,国内外有些学者尝试采用现代控制理论的方法进行汽车稳定性控制,并取得了较好的控制效果。模糊控制对非线性的复杂控制对象显示了很好的鲁棒性和适应性,非常适合汽车这一典型的非线性系统。本文将模糊控制和传统的模型参考控制相结合,建立了一种模糊自适应ESP控制器,该控制器具有对不同车速和不同附着系数路面的自适应能力。
2 车辆系统模型建立
建立了14自由度的车辆动力学模型,其包括

控制的车辆能够完成单移线操作,车辆保持稳定并提高了车辆的轨迹保持能力。从图7和图8可以看出,具备ESP控制的车辆,其质心侧偏角和横摆角速度与参考模型计算得到的名义值基本吻合,质心侧偏角控制在2°以内,起到了很好的控制效果。从图9的相平面可以看出,有ESP控制的相位图为一闭合曲线,表明其运动稳定。以上仿真说明,所建立的ESP控制器对汽车稳定性有很大提高,可以按照驾驶员的意愿行驶。图10为各轮缸的制动压力,由仿真结果可知,其制动压力分配逻辑和压力计算正确。
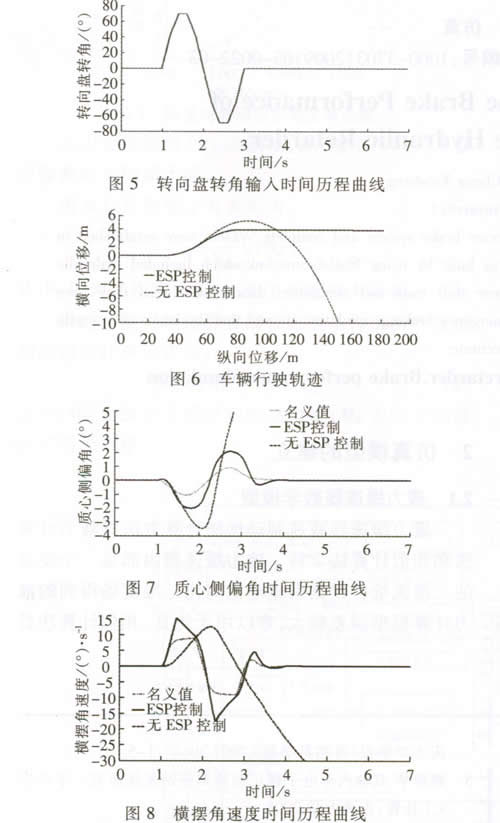
图11是在路面附着系数为0.6,车速分别为80km/h、100km/h、120km/h下的车辆行驶轨迹。从图11可以看出,随着速度的增加,汽车横向位移不断变大,但在不同车速下汽车都完成了单移线操作,没有发生失稳,说明该ESP控制器能够很好的适应不同车速变化。
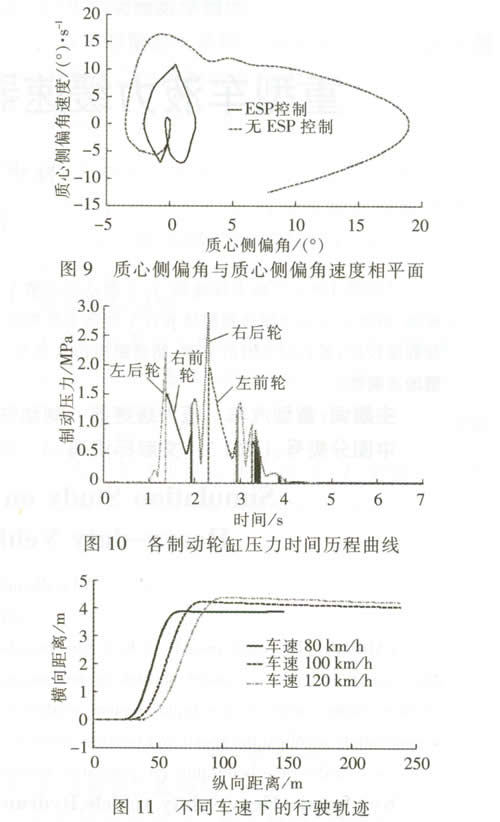
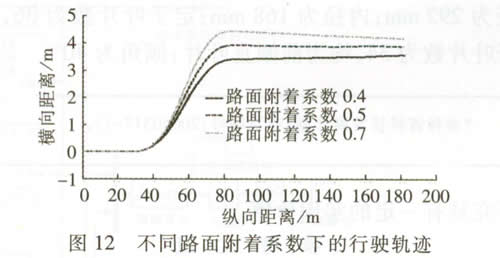
图12是在车速100km/h,路面附着系数分别为0.4、0.5、0.7时的汽车行驶轨迹。从图12可以看出,随着路面附着系数的增加,汽车横向位移不断变大,但在不同路面附着系数下汽车都完成了单移线操作,没有发生失稳,说明该ESP控制器也能够很好的适应不同附着系数路面的变化。
5 结束语
采用自适应模糊控制方法建立了ESP控制系统模型,仿真结果表明,该控制器能够有效提高车辆在低附着系数路面下的操纵稳定性,对不同车速和不同附着系数路面具有较好的适应性,同时控制器具有较强的鲁棒性,即控制算法是有效的,对ESP研究具有一定的实用价值。
