付博 孙仁云 张帅 单玉梅
西华大学交通与汽车工程学院
摘要 汽车在低附着系数路面加速、起步或爬坡时,驱动轮极易发生过度滑转从而使汽车失去稳定性,汽车牵引力控制系统将驱动轮的滑转率控制在最佳的范围。建立了四轮驱动汽车的动力学模型,以驱动轮的滑转率为控制目标,采用基于模糊PID控制的汽车牵引力控制的算法,设计了以制动阀为占空比为控制对象,从而达到调节轮缸制动压力的目的,在Matlab/Simulink仿真环境下,对车辆在均一和分离两种路面上进行仿真,对比仿真结果,表明模糊PID控制具有响应速度快、稳态性能好的特点。
主题词 汽车 牵引力控制 滑转率 模糊PID控制
汽车牵引力控制系统(TCS)通过实时地将驱动轮滑转率控制在纵向和横向附着系数都很大的范围内,以实现驱动车轮的最佳牵引性能。控制方法是决定控制品质的关键因素之一,国内外学者也分别用滑模变结构控制、PID控制、模糊控制和最优控制等方法对汽车牵引力控制进行了研究。由于模糊PID控制具有控制方式简单且无需被控对象数学模型的优点,模糊PID控制器是以误差E和误差变化EC作为输入,可以满足不同时刻的E和EC对PID参数自整定的要求。本文采用模糊PID控制方法,以驱动轮滑转率为控制目标,并且以四轮驱动汽车为研究对象,在均一路面和分离路面对汽车直线加速行驶工况下进行仿真。
1.4 整车模型
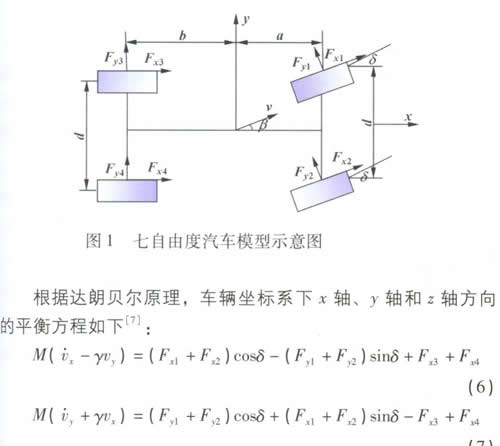
汽车在平直路面上行驶,车辆坐标系原点选择车辆的质心位置。沿汽车纵向轴线向前的方向为x轴方向,垂直地面向上的方向为z轴的正方向,y轴方向可由右手法则确定。整车共有七个自由度:车身纵向、侧向和横摆三个自由度,每个车轮的转动各为一个自由度,共四个车轮。除汽车坐标系之外还包括了大地坐标和车轮坐标系。车轮坐标系中,坐标系的原点位于轮胎轴心和中分线交点处,x轴正方向为沿轮胎中分线向前的方向,垂直于地面向上的方向为z轴正方向,y轴的方向可以由右手法则来确定,轮胎转动和所受的各项力和力矩处于车轮坐标系。大地坐标系原点位于汽车行驶的初始位置,x轴正方向为从原点出发水平向右,z轴正方向为垂直纸面向外,y轴正方向可由右手法则确定,如图1所示。

2 模糊PID控制算法的设计
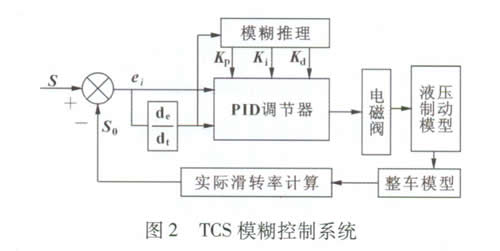
滑转率是描述汽车动力学性能的最基本的状态变量之一,能很好地反映汽车的防滑转驱动性。所以首先设计了以滑转率为控制变量的TCS模糊控制系统,如图2所示。此处牵引性模糊PID控制器是将汽车的实际滑转率S与期望滑转率S0的值之差ei作为误差值,把误差值和误差变化率作为控制器的输入,经模糊控制器后输出电磁阀的控制信号,从而达到调节轮缸制动压力的目的,并将调节后得到的制动力矩传递给整车模型,使得驱动轮的滑转率能够得到调整并逐步接近期望滑转率。
2.1 PID模糊控制器的设计
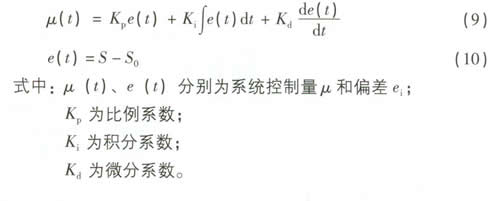
将实际滑转率S与期望滑转率S0的偏差ei 输入到PID控制器中,经过PID控制输出TCS硬件系统中常开和常闭阀的占空比,从而达到调节轮缸制动压力的目的,并将调节后得到的制动力矩传递给整车模型,使得驱动轮的滑转率得到调整并逐步接近期望滑转率。PID控制方法不需要了解被控对象的数学模型,其控制规律为:
2.2 模糊控制器的设计
TCS模糊PID控制系统中,核心部分为模糊控制器的研制。根据模糊控制器设计的需要,设其对应的模糊变量E、EC和U的量化论域分别对应如下:
E和U的模糊集均为{NB,NM,NS,ZE,PS,PM,PB};
EC模糊集为{NB,NM,NS,NZ,PZ,PS,PM,PB}。其中:NB为负大;NM为负中;NS为负小;NZ为负零;ZE为零;PZ为正零;PS为正小;PM为正中;PB为正大。
E、EC和U的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
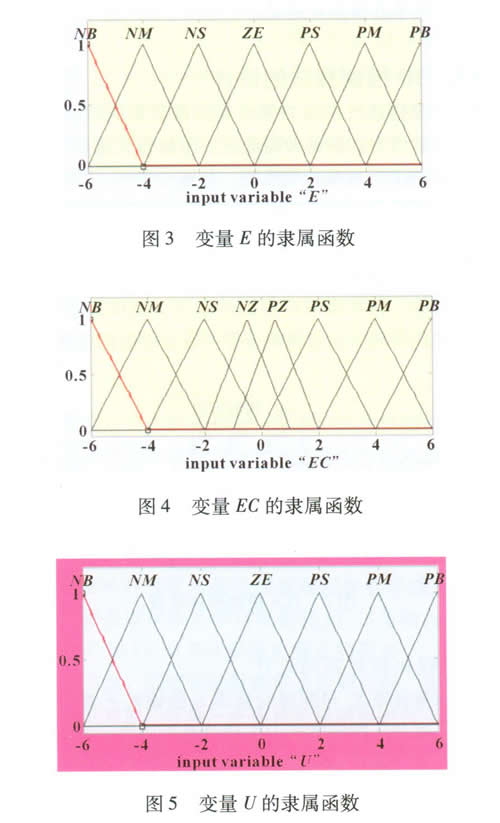
上述的误差模糊集选取8个元素,区分了NE和PE,主要是着眼于提高稳态精度。E、EC、和U的隶属函数图形如图3、4、5所示。
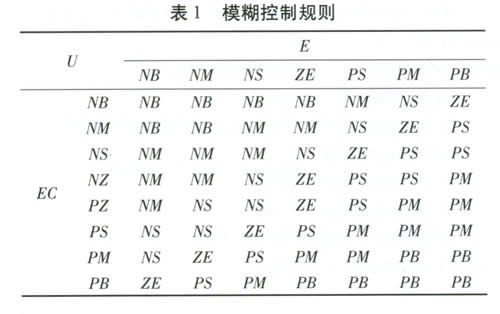
模糊控制规则如表1所示。
3 仿真结果与分析
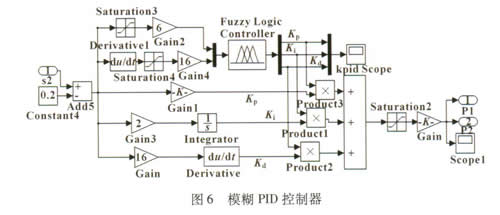
在建立好的数学模型的基础上,利用Matlab/Simulink以及Fuzzy Logic Toolbox将模糊PID控制系统的数学模型转换为计算机仿真模型。如图2所示,其控制原理为:当驱动轮将要发生滑转时,通过模糊PID控制器来调节制动阀的占空比,给制动系统施加一定的制动力,来防止驱动轮的滑转。通过整车模型计算出来的实际滑转率和期望滑转率的差值作为模糊PID控制器的输入,通过模糊PID控制器的调节,逐渐使汽车的实际滑转率接近期望滑转率。模糊PID控制器如图6所示,它是在运行中PID参数模糊自整定找出PID三个参数与E和EC之间的模糊关系,在运行中通过不断检测E和EC,根据模糊控制原理来对3个参数进行在线修改,以满足不同E和EC时对控制参数的不同要求,而使被控对象有良好的动、静态性能。在模糊控制器中三个参数的初始值为:Kp = 120;Ki = 2;Kd = 16。
模拟工况:选取均一低附着系数路面,峰值附着系数μ = 0.2,分离附着系数路面μ = 0.15/0.75,车辆起动并加速直线行驶6s。驱动轮制动压力曲线如图8所示,在模糊PID控制下驱动轮的制动压力逐渐趋于稳定,大概为2MPa,产生的制动压力能很好地满足抑制驱动轮发生滑转的要求。
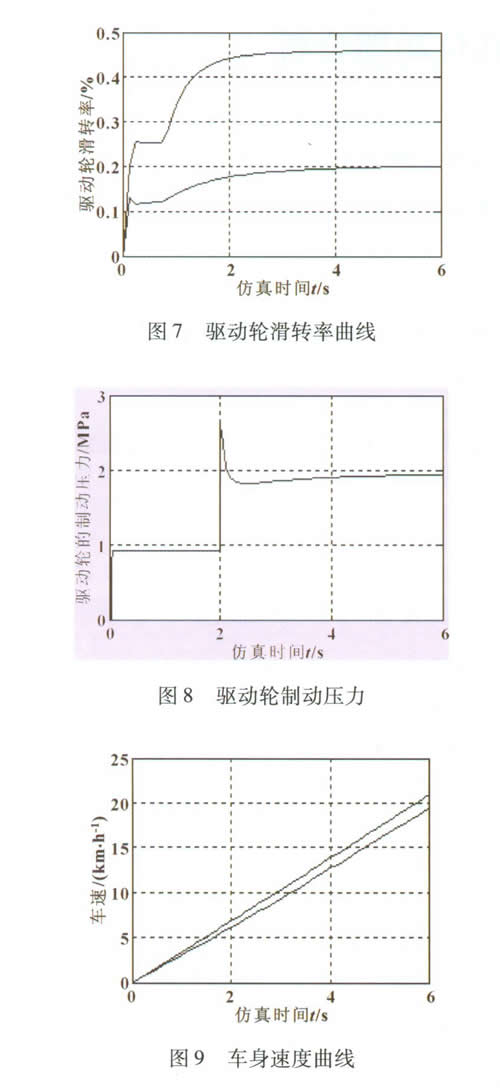
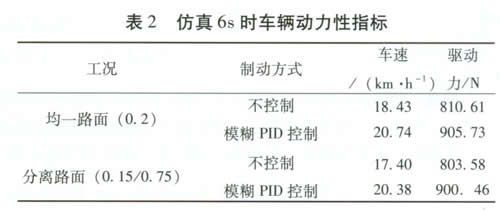
仿真结果如图7所示,由仿真结果可知,不采用控制的时候随着汽车的加速,驱动轮在2s的时候滑转率达到了0.45,汽车开始出现了滑转,逐渐失去了稳定性。而采用模糊PID控制时,随着汽车的逐渐加速,滑转率逐渐向着期望的滑转率趋近,到4s的时候几乎趋近到了期望的滑转率。表2给出了两种路面条件下不控制与模糊PID控制的驱动轮驱动力的仿真结果。车身速度如图9所示,均一路面采用模糊PID控制,汽车加速6s时车速为20.74km/h,相比不使用控制,车速提高了大约11.1%,驱动力提高了10.5%;分离路面采用模糊PID控制,汽车加速6s时车速为20.38km/h,相比不使用控制,车速提高了大约14.6%,驱动力提高了大约10.7%。显然模糊PID控制在改善汽车动力性及牵引力方面有着较好的控制效果。
4 结束语
在控制汽车滑转率方面,模糊PID控制算法不但有模糊控制对不确定和非线性对象的快速控制的能力,而且还具有较好的鲁棒性的优点,又具有稳态性能很好的特点。仿真结果表明,无论是均一路面还是分离路面,当驱动轮发生过度滑转时,模糊PID控制都能很好地抑制驱动车轮的滑转,并且能逐渐地趋近于目标滑转率,从而在改善车辆牵引性和动力性方面起到很好的效果。
