郑太雄 单荣明
重庆邮电大学
蒋国英 杨勇
重庆卡福汽车零部件有限责任公司
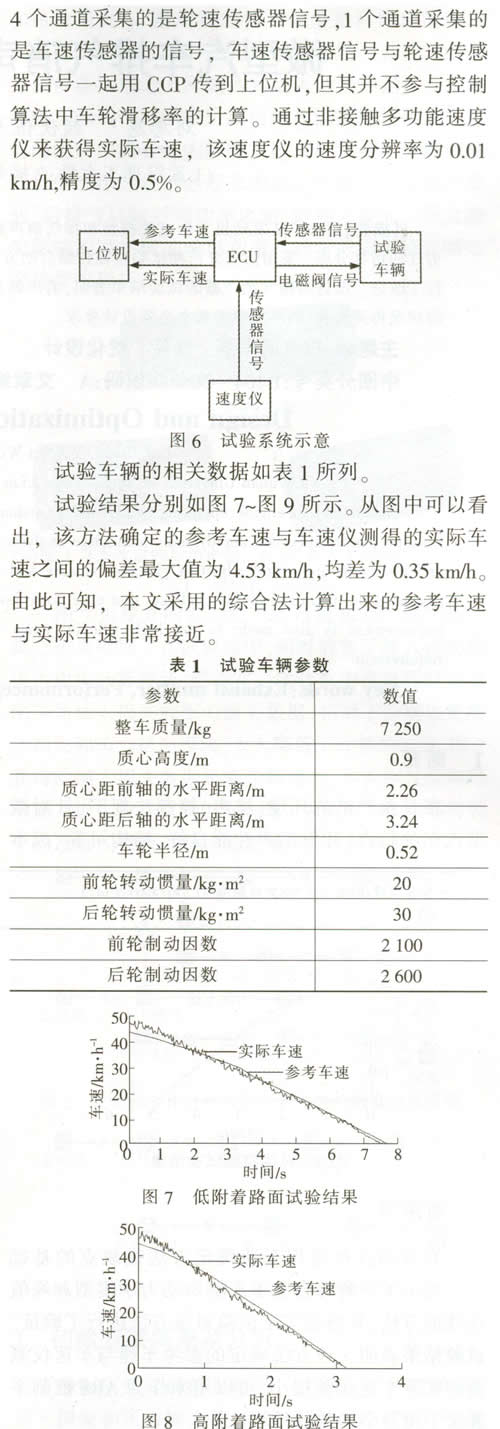
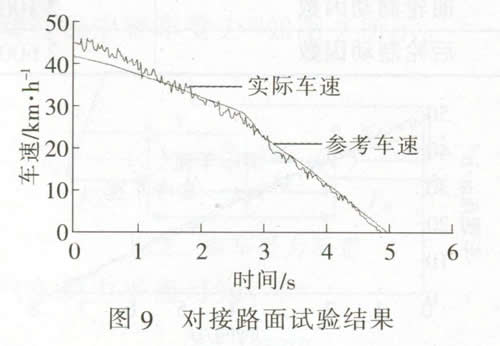
【摘要】分析了汽车防抱死制动系统中参考车速的多种确定方法。在分析了各种方法优、缺点的基础上提出了一种综合法,并利用该方法进行了首次制动循环和常规制动循环参考车速的计算。道路试验结果表明,采用该综合法确定的参考车速与车速仪测得的实际车速之间的偏差最大值为4.53km/h,均差为0.35km/h,从而验证了采用该综合法确定汽车防抱死制动系统中参考车速的准确性。
主题词:ABS 滑移率 参考车速
1 前言
汽车防抱死制动系统(ABS)能防止汽车制动过程中甩尾、跑偏的发生,大大提高了制动过程中的方向稳定性,并且缩短了制动距离,有效地避免了交通事故的发生。ABS的目标是在制动过程将车轮的滑移率控制在目标滑移率附近,以获得最大的地面附着力。制动时车轮减速度减小,在车速与轮速之间产生一个速度差,该速度差与车速的比值即是滑移率。由于ABS只装备了轮速传感器,因此车速估算在ABS控制算法中具有重要地位。本文在分析几种参考车速计算方法基础上,提出了一种综合法来实现参考车速的确定。
2 常用的参考车速确定方法
2.1 最大轮速法
汽车在行驶过程进行制动的时候,由于车轮打滑,车轮速度小于车身速度,故取4个车轮的最大轮速作为车速。这个方法的优点就是无需进行路面辨识,不考虑驾驶员的操作行为,但是它却有很大的缺点,即车速受4个轮速调节的影响,使其与实际车速偏差过大,以致滑移率计算误差过大。
2.2 斜率法
斜率法通过对大量试验数据的分析处理,确定车辆在各种路面上所能达到的平均减速度,以此为依据,在ABS控制过程中,确定制动初始速度,进行路面状况和制动工况识别后确定车辆减速度,根据速度公式实时计算速度值作为参考车速。该方法的优点是参考车速计算方法简单,若参数确定准确,参考车速可较好地逼近实际车速。其缺点是适应性较差,若初速度采集误差较大或减速度选取不当,参考车速计算误差很大。
2.3 基于车辆制动力学模型的确定方法
基于车辆制动力学模型确定参考车速的方法,是建立在整车、轮胎等模型的基础之上。它的优点是能实时更新参考车速,可较好地实现对实际车速的模仿。但是,这种方法受到所采用模型准确性的影响,对不同路面的自适应能力较差,在实际应用中会出现压力误差累计,影响制动效果。
3 综合法
在制动过程中,车轮速度会在ECU的控制下出现下降-回升-下降不断反复的过程,如图1所示。
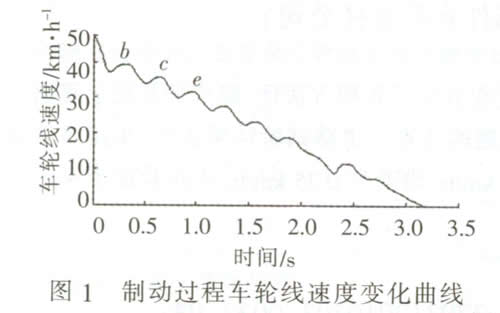
制动开始,随着制动压力的上升,轮速不断下降,一段时间后会有抱死的趋势,此时需进入减压阶段。随着压力的减小,车轮出现正的加速度,当车轮滑移率小于滑移率门限上限时,进入保压阶段。由于地面摩擦力的作用以及车轮惯性,车轮速度还会继续回升,当车轮滑移率小于滑移率门限下限时,将对车轮再一次进行增压控制。随着压力的增加车轮会由加速变为减速,如图1中b点为轮速由加速变为减速的拐点,称此点为轮速峰值点。此时b点的轮速最接近车速,随后的各峰值点的轮速均与车速接近,因此可取峰值连线的斜率估算车体减速度。
由于制动初期缺少必要的峰值信息,因此取从制动初期到出现第1个峰值为首次制动循环,其后阶段为常规制动循环。在首次制动循环和常规制动循环时分别采取不同的参考车速计算方法。
5 结束语
在分析几种常用车速确定方法优缺点的基础上,提出了一种综合基于车辆制动力学模型和峰值连线的方法,并通过实车试验对该方法进行了验证。试验结果表明,该方法确定的参考车速与车速仪测得的实际车速误差很小,可以用来作为ABS控制系算法中滑移率参数的计算。
