基于门限自调整的车辆主动横摆力矩PD控制策略研究
玄圣夷 白海英 宋传学 靳立强
吉林大学
【摘要】针对目前主动横摆力矩控制算法存在的问题,提出了基于门限自调整的PD控制算法,即利用逻辑门限值方法产生并调整PID控制器参数,并由PD算法产生车轮制动力矩实现车辆稳定控制。利用MATLAB/Simulink软件建立了该控制算法的仿真模型,分别在高附着路面和低附着路面进行了仿真分析。结果表明,该算法在各种工况下均能很好保持汽车稳定性。
主题词:车辆稳定性 主动横摆力矩 门限自调整PD控制算法
● 前言
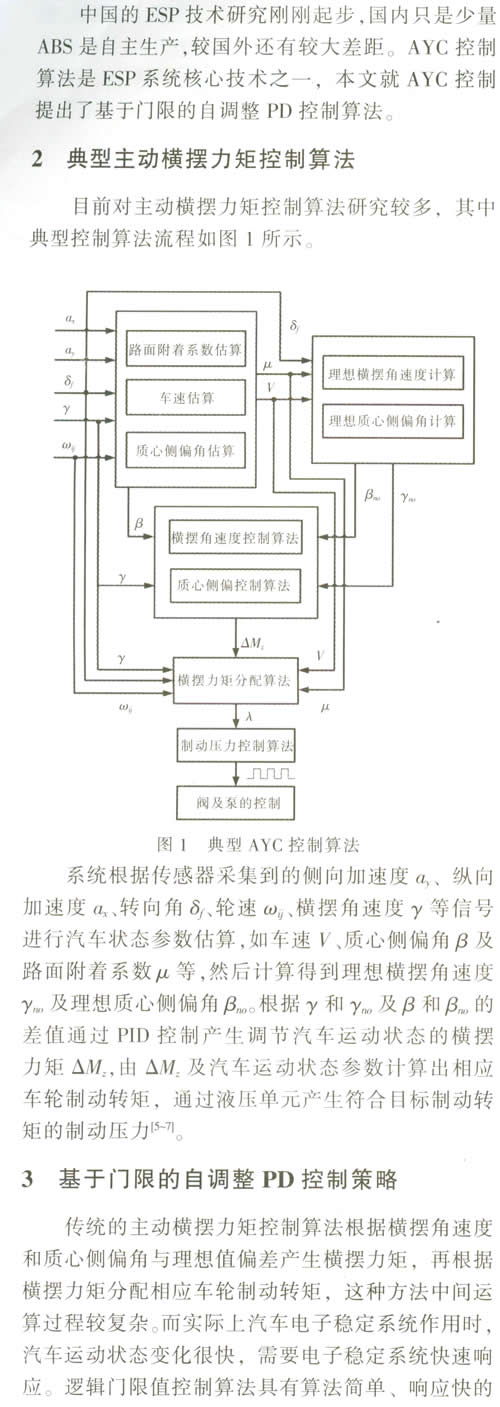
汽车电子稳定控制(ESP)系统是一种先进的主动安全控制系统,它主要有制动防抱死系统(ABS)、主动横摆力矩控制(AYC)、电子制动力分配(EBD)、牵引力控制系统(TCS)4方面功能。其中主动横摆力矩控制是根据车辆行驶状态,对相应车轮施加制动力以产生纠正汽车行驶姿态的附加横摆力矩,使汽车保持稳定。这种主动干预作用明显提高了车辆的稳定性与安全性,特别是在急转弯及低附着路面转向工况。
ESP系统对提高汽车稳定性,降低交通事故率具有重要作用。目前,美国、澳大利亚等国已完成车辆强制安装ESP系统的立法。美国要求2011年底,所有总质量小于4.5t的汽车必须将ESP系统列为标准配置。欧洲ESP系统装车率已达到较高水平,欧洲委员会21世纪有竞争力的机动车管理系统(CARS21)在10年计划中推荐强制安装ESP。
5 结束语
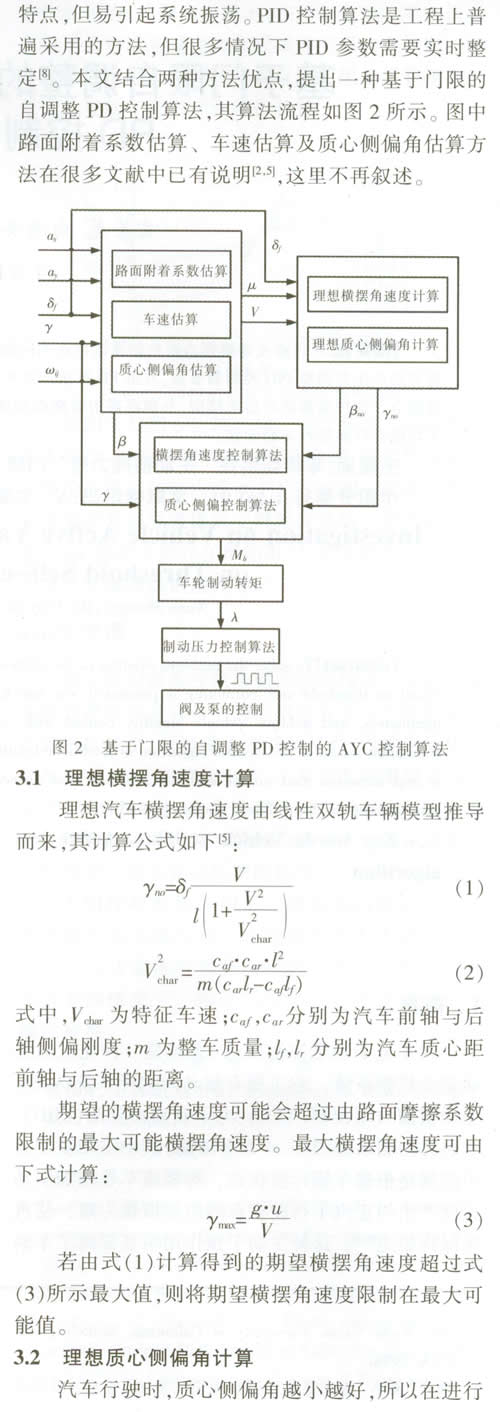
本文针对传统主动横摆力矩控制算法存在的问题,提出了一种基于门限的自调整PD控制算法的汽车主动横摆力矩控制算法。该算法利用逻辑门限方法产生PID控制参数,并由后者计算出车轮制动力矩,中间省去了横摆力矩计算及分配环节,具有响应快、计算环节少的优点。通过仿真表明,该算法在各种工况下均能很好地保持汽车稳定性。
