图6为电动汽车的液压制动和制动能量回收控制。
制动能量回收电控单元,基于各车轮加速度传感器的检测输出信号判断车辆是否在良好路面状态或恶劣路面状态,只有在良好路面状态下,制动能量回收电控单元对液压制动与电机的制动能量回收实施协调控制。这是一般电动车进行能量回收制动的必要性。如果在恶劣的路况下,考虑到车辆的制动安全性,电机的电控单元及制动能量回收电控单元发出指令,逐步限制制动能量回收,直至禁止,而只允许液压制动。
由图6可知,驱动交流电机的输出轴与车辆驱动轴连接,而驱动电机通过逆变器接收来自动力蓄电池的电力供应。逆变器则按照来自动力蓄电池的控制信号使动力蓄电池的直流电转换为交流电,向驱动电机供电。
电机电控单元与逆变器一起控制电机的输出扭矩。例如当电机驱动运转时,电机电控单元基于加速踏板的踏进量信号或电机的转速信号的输入,控制逆变器的电力变换过程。由此,从电机获得对应于加速踏板踏进量的输出扭矩。
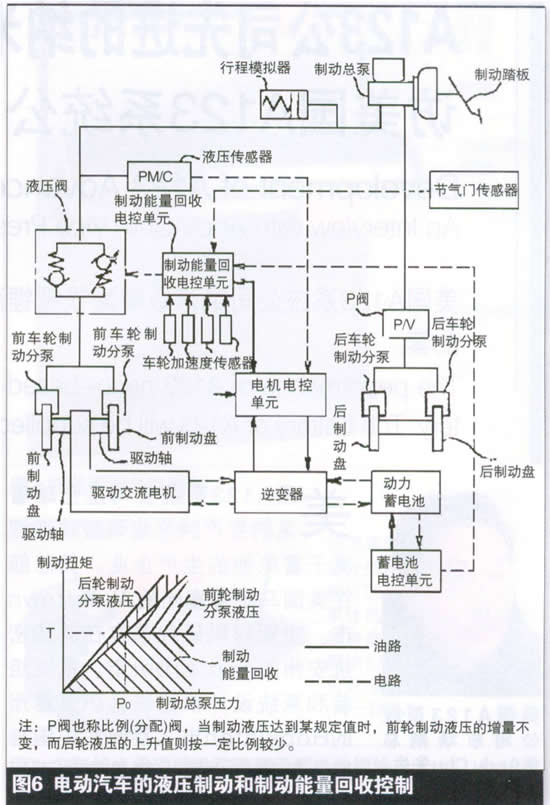
从制动总泵到前车轮制动分泵及后车轮制动分泵的油路,制动总泵发生对应于制动踏板踏进量的液压,并通过液压阀及比例阀(P阀)向前车轮制动分泵及后车轮制动分泵供给制动总泵液压。前车轮制动分泵及后车轮制动分泵对前制动盘与后制动盘分别施加总泵压力。由此,液压制动扭矩对前后车轮起到制动作用。
液压阀是一种由制动能量回收电控单元控制的阀,设有增压侧的菌状阀(poppet valve)和减压侧菌状阀。当制动总泵液压与前车轮制动分泵的液压差大于由制动能量回收电控单元给定的开阀值P0时液压阀开启。相反,液压差小于开阀值P0时则处于关闭状态。从而制动总泵到前车轮制动分泵的油路切断。而且处于不受制动能量回收电控单元控制的状态(切断状态)时,则制动总泵与前车轮制动分泵连通,液压阀则使制动总泵液压保持不变传递到前车轮制动分泵。
在制动总泵与液压阀之间设有行程模拟器(stroke simulator)。这种行程模拟器由液压阀使制动总泵到前车轮制动分泵的油路被切断状态下,制动踏板的踏板行程处于自然状态而消耗液压。制动总泵与液压阀之间又设有液压传感器,通过液压传感器测出制动总泵液压。经过检测的制动总泵液压提供给电机电控单元,并控制制动能量回收时电机的输出扭矩(称为制动能量回收扭矩)达到与制动总泵液压相对应的值。这种制动能量回收系统以下面的顺序进行制动能量回收控制。
首先,由节气门传感器检测加速踏板是否断开的状态,则电机电控单元与制动能量回收电控单元基于由蓄电池电控单元检测获得的蓄电池的信息,计算最大制动能量回收的扭矩T0(相当于蓄电池能量回收能力的扭矩)。
接着,决定与此相当的压力,并以该压力设定为液压阀的开阀值P0。
此后,当踩制动踏板,则制动总泵液压通过比例阀加载于后制动盘,液压制动扭矩直接作用于各后车轮上。此外,如果制动总泵压力大于液压阀的开阀值P0。,则制动总泵液压通过液压阀施加于前制动盘,而液压制动扭矩直接作用于各前车轮上。
这时,制动总泵液压上升,并通过液压传感器加以检测,作为其响应,电机电控单元及制动能量回收电控单元计算对应于制动总泵液压的能量回收制动扭矩T,并以该制动能量回收扭矩T对逆变器进行控制。由此电机的制动能量回收的扭矩发挥作用(电机进入发电机状态运转)。
M/c P(制动总泵液压)→T(制动能量回收扭矩)→T0(作为发电机扭矩)→制动能量回收发电
接着,基于由蓄电池电控单元检测的蓄电池的信息判断其制动能量回收能力,并根据该回收能力求出开阀值P0并调整,一边设定液压阀的开阀值P0。
当实现这样控制时,也就是说,当制动总泵压力低于开阀值P0时,只有能量回收制动扭矩对前轮发生作用,当制动总泵压力大于开阀值P0时,制动能量回收扭矩达到最大值,通过液压阀液压制动扭矩开始发生作用。另一方面,制动总泵压力低于开阀值P0,则通过比例阀把液压制动扭矩作用于后轮。当车轮加速度发生波动时,或者车身上下加速度发生振动,则由液压传感器检测的制动总泵压力发生波动。例如,在恶劣路面行驶时,或者在冰雪地带采用防滑链的车轮行驶时,制动总泵压力发生波动。这时,制动总泵压力低于开阀值P0则对应于制动总泵压力而决定制动能量回收扭矩,所以随着制动总泵压力的波动,制动能量回收扭矩也发生波动。
因此,在这种制动系统中,必须判断车辆是否行驶在良好路面或恶劣路面上,也就是说必须判断制动能量回收扭矩的波动是否达到充分小状态(制动总泵压力波动充分小的状态)或者由于路面阻力加大,制动能量回收扭矩波动是否增加状态(制动总泵波动增大的状态)。当车辆在恶劣路面行驶时,根据阻力情况判断制动能量回收扭矩的波动增大状态,直至禁止制动能量回收,而只进行液压制动,以确保车辆的制动安全性。
作出上述判断是由制动能量回收电控单元完成的。就是说,制动能量回收电控单元基于由图6所示的各车轮加速度传感器的输出信息,对车辆是否在良好路面或恶劣路面上行驶状态作出判断。
在防抱制动系统(图中未画出)中,直接输入来自各车轮加速度传感器的检测信息,进行制动控制。制动能量回收电控单元通过低通滤波器(10w pass filter)输入各车轮加速度传感器的检测信息,由此求得各车轮的旋转加速度DVW。与此同时,通过直接输入各车轮加速度传感器的检测信息,求得各车轮的瞬间加速度,并基于各车轮的旋转加速度DVW及各车轮的瞬间加速度,判断车辆是否在良好路面或恶劣路面行驶状况。
接着,示出车轮在良好路面或恶劣路面行驶的判断条件。
根据这样条件,制动能量回收电控单元判定车辆是否行驶在良好路面或恶劣路面上,只有在良好路面行驶时求得满足上述动力蓄电池的能量回收能力的开阀值P0,并对液压阀设定该开阀值P0,与此同时,求得与制动总泵压力相关的制动能量回收扭矩,按照该制动能量回收扭矩T控制逆变器。由此,对液压制动与由电机执行的制动能量回收实施协调控制。
当判定为车辆在恶劣路面上行驶,则电机电控单元及制动能量回收电控单元发出指令逐渐限制制动能量回收,最终禁止制动能量回收,而只进行液压制动。就是说,一旦求出满足动力蓄电池的能量回收能力的最大能量回收扭矩T0,不管动力蓄电池回收能力,使最大能量回收扭矩T0逐渐减少,直至为0。由于T0逐渐减少直至0,由此,通过逆变器回收的最大电力逐渐减少。在开阀值P0逐渐减少直至为0,传递到前轮制动分泵的制动总泵的压力的最小值逐渐减少,于是使前轮的液压制动扭矩最小值逐渐减少。其结果由电机执行的制动能量回收扭矩为0,制动总泵压力几乎不变地传递到前轮制动分泵,实现只有液压制动。
于是当判定车辆在恶劣路面上行驶,禁止制动能量回收。如果只进行液压制动,不受制动能量回收扭矩波动影响,也就不会出现制动踏板的踏板力与制动扭矩不一致,使驾驶员制动路感恶化的情况。
如果看一下防抱制动系统情况,防抱制动系统大多是车辆在恶劣路面行驶时发挥作用。防抱制动系统开始工作时,车辆制动处于不稳定状态。为此,如果在防抱制动系统工作以前,判定车辆在恶劣路面上行驶,禁止制动能量回收,只进行液压制动,那么就可以避免防抱制动系统工作开始时的不稳定状态。
