集成被动悬架的车辆滑移率控制器的性能
研究人员对车辆紧急制动时的安全系统投入更多的关注。早在20世纪50年代就开始研究制动防抱死系统,控制算法主要是基于规则的方法,该方法有很多缺点:滑移率在最高摩擦点附近震荡将会引起车辆的振动,影响ABS的性能;为了调试控制器需要做大量路面试验,这将会花费很多的时间和资金。因此本文主要采用基于模型和软件对其进行研究。
应用被动悬架的动态性能与ABS的PID控制器结合以提高驾驶性能,缩短制动距离。利用悬架挠度提高乘坐舒适性。集成被动悬架和车辆模型将会对ABS的性能产生一些影响,主要包括:增加了非线性性能、明显的路面干扰。如果ABS控制器设计的不理想将会影响悬架的动态性能。因此,控制器需要在保证提供转向控制和良好的乘坐舒适性的前提下处理这些问题。本文提出的控制器说明主要如下:①车辆初始速度22.23m/s情况下制动距离小于50m;②悬架挠度变化范围为-0.08~0.08m;③簧上质量加速度范围为-0.2~2m/s2。
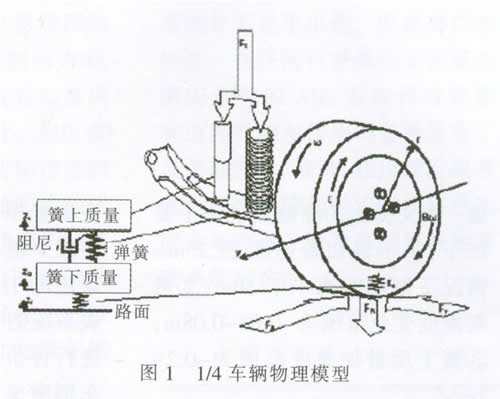
提出了ABS的PID车轮滑移率控制算法。滑移率控制器与被动悬架集成在一起,主要目标是减少制动距离。采用包含液压系统的1/4车辆模型(图1)。集成系统的性能采用正弦路面干扰进行评价仿真结果表明,在满足车辆乘坐舒适性标准的情况下,制动距离得到了进一步的减少。本文所提出集成控制方法比单纯应用ABS的制动距离缩短6%。