电子机械制动系统(EMB)采用电机驱动制动系统,具有反应迅速、准确等特点。由于难以在制动系统中安装力或力矩传感器,因此无法直接估算夹紧力。提出一种考虑反弹迟滞的根据电机转子位置估算夹紧力的新方法。并提出探测摩擦片与制动盘接触点和考虑制动器温度变化的新方法。
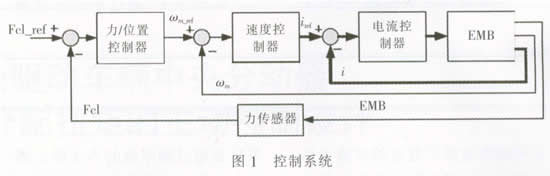
电机模型包括永磁同步电机和矢量控制模型、行星减速齿轮组模型、螺旋齿轮模型、摩擦片和制动盘模型等。整个控制系统采用级联式结构(图1)。电流、速度和夹紧力/位置控制器均采用PI控制。为了维持恒定制动器间隙,当不施加力时,需要控制螺旋齿轮位置。当输入非零夹紧力指令时,采用力控制,反之采用位置控制。
现有夹紧力估计算法只考虑了施加和解除制动时摩擦力矩的滞后,但由螺旋齿轮和行星齿轮引起的滞后同样需要考虑。提出了考虑所有滞后效应的夹紧力估计算法。夹紧力与电机角位移的关系曲线显示了滞后特性,通过最小二乘法拟合得到施加和解除制动过程的4阶多项式曲线。由于制动器在摩擦片与制动盘接触后才产生制动力矩,提出通过对电机角位移和力矩求微分判断结果是否超过國限值的方法确定接触点。制动时的高温会影响摩擦片和制动盘刚性,从而对估计力的结果产生较大影响。建模时根据温度与刚性曲线确定了温度的影响。
通过对比原有夹紧力估计算法与本文算法在Matlab/Simulink中仿真结果,证明算法的有效性。
