如果将雷达传感器独立开来,其技术潜力已经差不过被挖尽。因此奥迪在自适应巡航控制系统(ACC)上推出了多传感器监控车辆四周的系统——结合雷达、影像和超声波系统。这种联网化的系统还包括Stop & Go功能,进一步扩展了远程控制系统。慕尼黑的德国联邦陆军大学对这种极端敏感、与安全息息相关的驾驶辅助系统进行了各种项目的测试。
基于雷达的远程控制系统已经在市场上推广并得到应用,其原因就是目前传感器性能得到了提高,控制算法也正在发展。
另外,预先制动辅助系统也发挥了作用。即使没有激活自适应巡航控制(ACC)功能,这些有助于提高安全性的功能都能够在碰撞发生时有效保护车内人员。
ACC系统还增强了预先路面响应的安全辅助功能,新一代ACC系统选择最合适的控制算法,还将驾驶习惯和Stop & Go功能纳入考虑范围中,整体功能有了进一步的提升。
联网的环境传感器
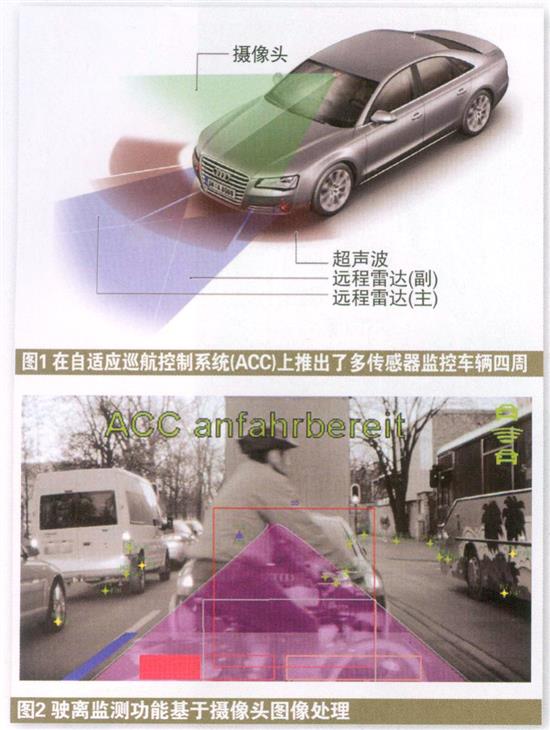
就单单雷达传感技术而言,几乎已经没有潜力可以挖掘了。因此奥迪ACC系统首次采用了多传感器的方式来监视周围环境,结合了雷达、影像和超声波系统。
双雷达系统:首次采用双远程雷达系统(77GHz)。两个远程雷达单元安装在前保险杠雾灯的位置,而雾灯集成到了主前照灯单元中,成为全天候照明系统(all-weather light)。为了确保在极度寒冷的条件下也能运行,雷达的镜头可以加热。双雷达系统的优点是其更大的水平扫描角度,约为40°,还能融合两个传感器的数据。
摄像系统:如果选择安装ACC系统,那么同时也会在风窗玻璃的区域安装一个单眼摄像头。这个摄像头主要用于道路指引、照明控制和限速显示。ACC系统特有的一个新功能是基于图像处理算法的车辆和障碍物识别。
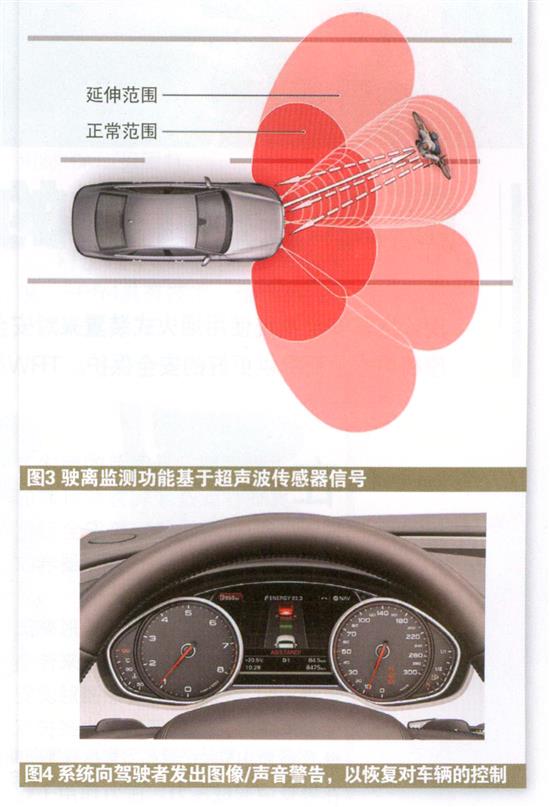
超声波传感器:用于停车辅助功能的超声波传感器经过了优化,与ACC系统在各方面结合。当ACC系统激活时,在前保险杠的四个传感器调整到一个特殊的扩充域模式,感应范围几乎增大一倍。
驶离(drive-off)监控
研发工程师将ACC的算法进行延伸,ACC系统对车辆从静止到驶离时的雷达、影像和超声波传感器信息进行评估。各种传感器和控制单元通过Flexray和CAN车载网络系统实现联网。
驶离监控算法的任务就是识别可能的障碍,但是目前还存在着局限性,那就是两个雷达传感器只能检测到1~1.5m以外的物体。不过这个缺陷可以得到一定程度的补偿,通过考虑内部质量测量,计算前方物体是障碍物的概率。而视频图像处理的优势在于,特别是在静止环境中,移动的物体可以非常快速而可靠地被侦测到,比如在静止的两辆车中间走过的行人。
视频图像对可能的障碍物进行识别,其它测定值则转入ACC主控制单元。在车辆正前方的近距离区域由超声波传感器系统覆盖,侦测范围达到前方4m,还包括与前方车距的侧面。停车辅助控制单元不停将测距信息传送到主ACC控制单元。奥迪公司开发的测量软件会测定超声波所探测到的前方可能的障碍物。
ACC的Stop & Go和驶离辅助功能
新一代的ACC系统带Stop & Go功能和驶离辅助功能,加入控制和显示的概念并得到了优化。该系统将适用范围最大化,也可以自行从边缘状态中调整过来。比如在A8的应用上,驾驶者甚至可以在极慢速的状态下激活ACC系统,并选择想要的速度和距离。另外无论车辆是在静止状态下,还是前方有车的情况下,都可以激活ACC系统。
而在道路拥堵的状态下,如果搭载ACC系统的车辆自动停止,系统依然保持激活的状态,驶离辅助等待前方车辆再次开始驶离。如果停止状态仅为2~3s,A8便会自动开始驶离。如果停止时间较长,比如遇到红灯的情况下,驾驶者可以通过将控制杆拉到“Resume”,或踩下加速踏板来重置该系统的程序。在此与上一代ACC系统进行一个对比。在使用上一代系统时,驾驶者需要保持前方车辆能够被侦测到的状态,只有前方车辆开始移动后才能激活驶离辅助功能,这就常常导致两车间拉开数米的距离。如今奥迪A8搭载的ACC系统就允许驾驶者在前方车辆开始移动的前15s激活驶离辅助,即当驾驶者看到信号灯转绿,前方车辆准备前行的时候就可以激活驶离辅助。相对上一代系统加长到15s的时间就是通过驶离监控功能实现的。如果两车间隔中有障碍物存在,驾驶者会收到可视信号和声音信号要求其控制车辆。于是驾驶者就有更多的时间来应对碰撞的风险,处理车辆间距的问题。
驶离监控的性能
在研发中,为了测试三重识别程序的可靠性,进行了数量庞大的测试。一共进行了540个单项的测试,有效覆盖了各种可能的情况。测试结果显示,540次测试中,有61次未能有效侦测到障碍物,识别率约为88.7%。但是如果是障碍物距离低于6m的,识别率则高达98.6%。
关于系统设定
在研发过程中,有大量关于系统设定和人车交互的问题需要解决。其中系统设定的核心问题与驾驶者直观可靠地了解系统及系统的局限性息息相关。换句话说,就是驾驶者必须承担起自身的责任,随时对遇到的情况做出及时的反应。在安全方面就有这样两个问题:
当汽车重新起动,从车辆起动到开始驶离这段时间里,驾驶者是否需要花长时间恢复对周围和车辆前方的关注?
如果系统发生故障,如何保证驾驶者能够做出正确的反应?
这些问题可以通过实际道路上的驾驶测试来回答。
第一个问题与激活“驶离”(控制杆处于“Resume”状态)到车辆开始移动的最长时间有关。如果驾驶者要求车辆驶离,不可能车辆立刻就实际进入“驶离”状态。在这段时间里,会存在驾驶者分心,让驶离辅助系统单独控制车辆的风险吗?在实际测试中,为了分散驾驶者的注意力,会让驾驶者同时进行其它操作(如打开空调或打开副驾驶座一侧车窗等等)。所有的测试都证实驾驶者会在车辆开始移动的时候立刻重新注意道路前方,因此结论是车辆的移动会使驾驶者立即做出反应,看向道路前方。
在系统侦测到两车间距内有障碍物时,车辆还是会前进(虽然会减速并发出警告信号)。其实这也说明了为什么在检测到前方有障碍物时车辆不会立刻停下来的原因,当然系统并没有故障。但是如果系统没能侦测到前方障碍物呢?虽然这种情况极少发生,但不能排除发生的可能性。此时驾驶者将如何应对此类系统故障?测试对这个问题进行了系统的调查。
在驾驶者清楚地知道当系统发现两车间隔中有障碍物时,会拒绝驶离的情况下,测试模拟了一个故障:在车辆即将起动时,测试人员从两车间隔中穿行过去,但是在这个情况下车辆开始移动了。测试中,所有驾驶者都立刻发现了行人,几乎所有人都正确地做出反应,踩下制动踏板。只有少数几个人过了较长时间才意识到系统并没有做出反应,但他们还是及时踩下了制动踏板。测试的结果清楚地显示,问题不在于驾驶者是否能及时发现障碍物,而是在于是否能及时对障碍物做出反应,采取适当的行动。驾驶者明白驾驶辅助系统在发现前方有障碍物时会禁止车辆驶离,所以他们需要一些时间意识到自己需要自行采取行动。事实上驾驶辅助可以提前15s激活,即使前方突然出现障碍物,也有充分的时间做出反应。
在驾驶者熟知ACC系统、ACC系统的Stop & Go功能和驶离监控功能之后,驾驶行为会更明确、更一致。驾驶者所选择的设置会使人车合理分工,使行车更加安全。