基于LabVIEW的ESP硬件在环仿真实验台开发及仿真研究
高明 赵楠
株洲易力达机电有限公司
张荣芸
合肥工业大学机械与汽车工程学院
【摘要】 基于LabVIEW搭建了ESP硬件在环仿真实验台。建立了七自由度车辆模型,以横摆角速度和质心侧偏角作为特征参数设计了ESP的PD控制算法,并在该实验台上进行了急剧双移线测试。测试结果证明了硬件在环方法是检测ESP控制器可靠性、建立虚拟极端测试场地测试控制算法有效性以及进行控制器参数匹配调试的有效手段。
关键词:硬件在环 PD控制 LabVIEW 双移线测试
0 引言
近年来ESP系统得到了越来越广泛的应用,它是在汽车制动防抱死系统(ABS)和驱动力控制系统(TCS)等技术基础上发展起来的一种新型主动安全控制系统。ESP是一个与很多因素密切相关的非线性控制系统,它的开发涉及到了电器电子、传统机械、液压系统、软硬件设计、数据传输等诸多领域。较为精确的车辆加减速度门限值、各个车轮的滑移率门限值、电磁阀的压力变化脉冲长短、电磁阀马达开关的时长以及车轮在各种路面上参考车速的变化率等参数,就成为了开发ESP系统控制逻辑的重要基础。而要得到这些准确的参数就必须进行试验,因此,实车试验在ESP控制系统开发过程中具有重要作用。但是传统的实车道路试验方法耗资大、开发周期长、柔性差,难以测试汽车在不同工况下的控制效果;并且试验具有相当的危险性,需要专门的试驾人员;再者,试验对场地要求很苛刻,需要专门的汽车试验场地。
硬件在环仿真试验是克服上述实车试验缺点的有效手段,因此开发ESP硬件在环仿真平台也就成为一种迫切需求。因为它能够代替ESP控制系统前期开发的实车试验,可以在进行整车道路试验之前完成ESP控制算法的调试,缩短控制系统开发周期,降低开发成本。因此,建立ESP硬件在环仿真试验台是开发ESP产品必不可少的一个环节。
随着计算机技术的发展,硬件在环仿真试验技术也得到了飞速发展,目前常见的开发工具主要有:xPC Target、dSPACE以及NI公司的LabVIEW RT。LabVIEW是一种图形化编程软件,是一种功能强大、方便快捷的开发虚拟系统的编程工具,并且LabVIEW RT模块配合实时操作系统具有良好的实时性,与配套硬件联合使用,能够容易地实现硬件在环试验平台的开发。
笔者利用LabVIEWRT模块搭建了ESP系统硬件在环仿真试验平台,并利用建立的七自由度整车模型在所搭建的试验平台上进行了控制算法的开发和硬件在环试验验证。
1 系统模型
由于veDYNA中提供了高精度的参数化的整车动力学模型、发动机模型、传动系统模型、转向系统模型、悬架模型和轮胎模型等。根据研究需要,在此保留veDYNA软件中车辆模型的主体,仅对发动机模型、制动系统模型和驾驶员模型做适当修改,并嵌入自行设计搭建的控制器模型。而对其他系统仅修改缺省参数值,从而完成系统模型的建立。
2 控制变量期望值确定方法
控制变量的期望值是指控制系统的参考量,期望值的精度直接影响着控制系统控制的精度和能否最终获得期望的效果。由前面的分析可知,本文以横摆角速度和质心侧偏角为控制变量,因此,所需要确定的期望值为期望横摆角速度和期望侧偏角。期望值的确定以二自由度车辆模型的等速圆周行驶稳定工况为依据,兼顾地面摩擦系数等因数的限制,以得出较为精确的控制变量的期望值,作为后续控制的量化基础。
2.1 期望横摆角速度的计算
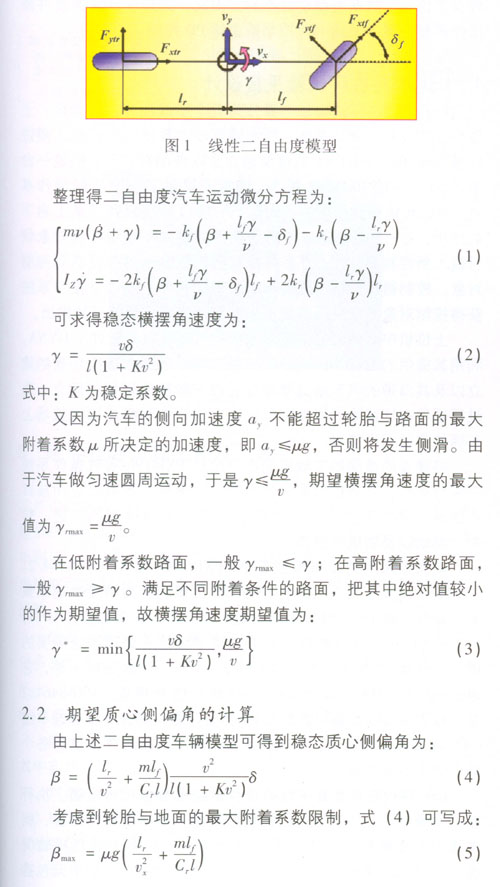
汽车线性二自由度模型描述汽车的转向特性是比较理想的,结合轮胎模型对汽车稳定性的控制也是有效的。所以计算汽车的期望轨迹采用二自由度模型是合适的。二自由度模型如图1所示。
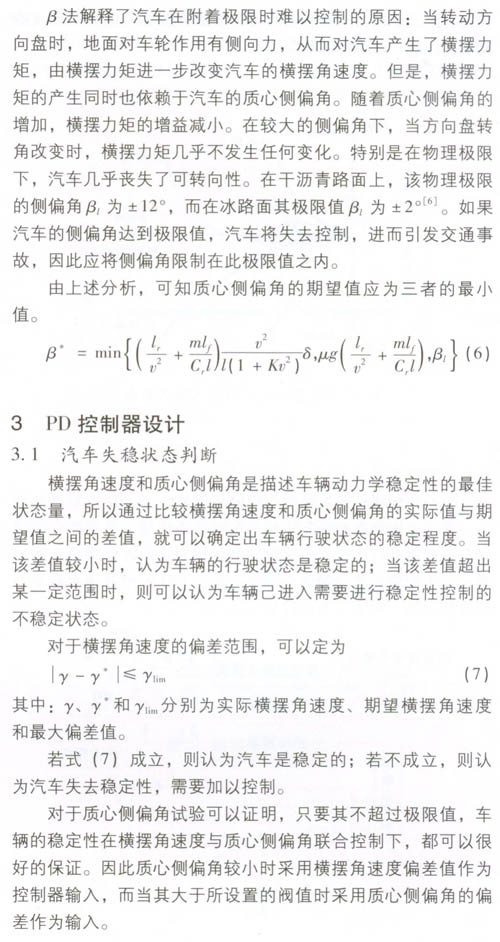
3.2 制动力分配控制方案
笔者考虑通过制动力控制来调节车身稳定性。ESP系统主要是通过对车轮制动和驱动的控制来产生附加横摆力矩的,对不同车轮制动所能产生的附加横摆力矩方向和大小是不同的,如图2所示。因此ESP控制系统需要在汽车失去稳定时,先通过PID控制算法决策出制动力矩的大小,再通过制动力分配方案将制动力分配给合适的车轮。
由图2可以得到如下制动力分配方案:对外前轮施加制动力会产生有效的反横摆力矩,使车辆产生不足转向倾向,对调整转弯时的过度转向有效;对内后轮和外后轮制动都会产生横摆力矩,使车辆有产生过度转向的倾向,对调整转弯时的不足
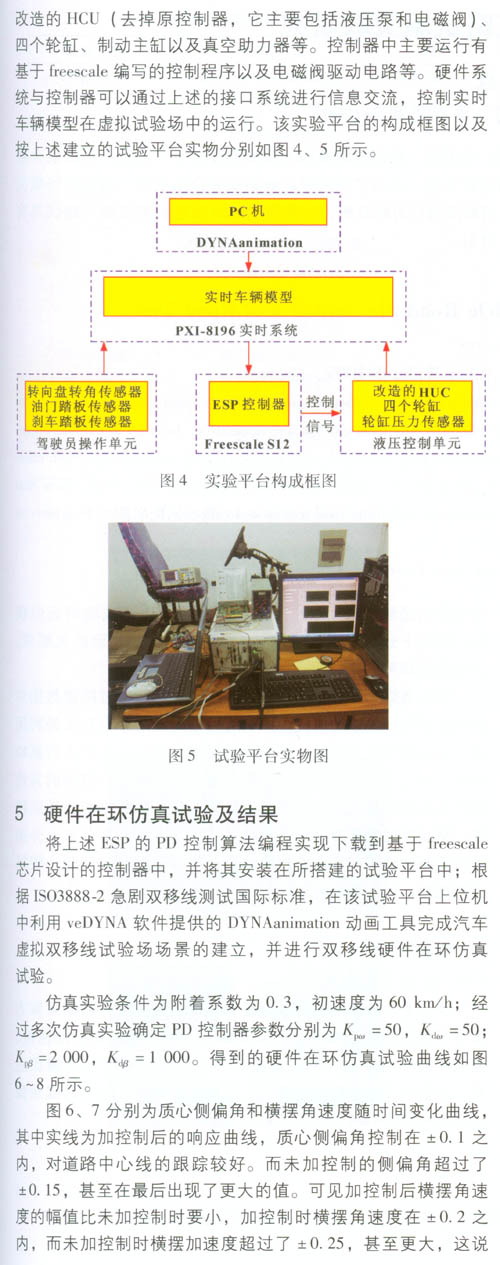
4 ESP硬件在环试验平台设计
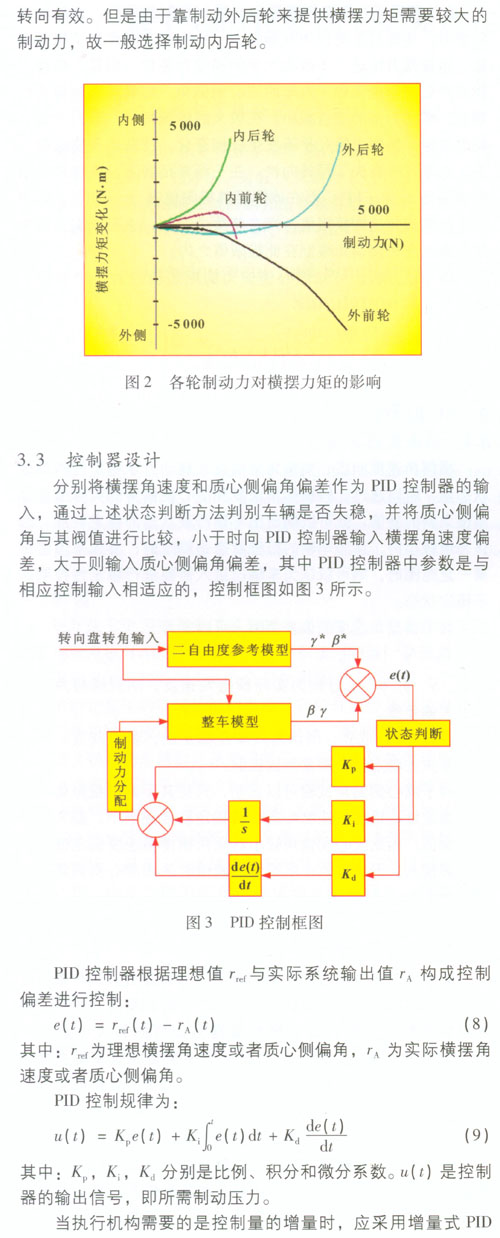
ESP硬件在环试验台一般分为五个组成部分,分别是:上位机、下位机、接口系统、控制器及硬件系统。上位机主要进行基于Matlab/veDYNA的模型建立及软件编程;下位机是一台美国NI公司的PX18196板卡,该板卡提供了一个实时操作系统,用以实现车辆模型的实时运行;接口系统起到了承上启下的作用,它一方面将通过传感器获得的硬件系统中控制对象信号输入到控制器,另一方面将控制器控制输出信号发送到控制对象;控制器运行基于freescale编写的程序,通过从接口系统获得控制对象的信号,再根据控制算法决定控制信号的输出。
上位机中软件部分主要是专业的汽车动力学软件veDYNA,利用其提供的DYNAanimation动画工具完成汽车虚拟场景的建立以及其自带的汽车动力学模型完成车辆精确模型的建立。在进行硬件在环试验时操作者可以在上位机中观察虚拟试验场上车辆的实时运行情况。
将建立的准确的车辆模型在下位机PX18196实时操作系统中实时运行,它将模拟实车的行驶,试验操作者可以应用接口系统通过硬件系统来完成下位机中实时车辆模型的前进、转向、制动以及后退等操作。
本文中采用的接口系统是NI PXI-6289与NI PXI-8464/2。PXI-6289采集卡是NI公司生产的32位多功能高精度数据采集卡,具有4路16位模拟输出(2.8 MS/s),48条数字I/O口,2个32位80 MHz计数器,完成试验平台信号处理系统需要的模拟信号输入/输出、数字信号输入/输出、计数器输入等,它通过一个转接板(如SCB-68)与外部信号相连。PXI-8464/2是一款2端口收发器可选的CAN界面,专为高速、低速或单线CAN设备通信而设计,可以在配置工具或应用程序中选择各个端口适合的收发器。
ESP硬件在环仿真平台的硬件系统主要包括传感器、执行器、控制器等。传感器包括转角传感器、油门踏板传感器、刹车踏板传感器和四个轮缸压力传感器;执行器主要包括转向盘、油门刹车踏板以及液压控制单元,其中液压控制单元包括
虚拟极端测试场地测试控制算法的有效性以及进行控制器参数匹配调试;另外在必要时,利用仿真实验台还可以代替某些危险试验,以提高安全性和经济性。