【摘要】无人驾驶汽车大大提高了交通系统效率和安全性,是未来汽车发展的一个方向。线控制动技术是实现无人驾驶汽车底层控制的关键技术之一,但目前线控制动技术仍处于研究阶段,技术尚未成熟。文章介绍了基于电子稳定控制系统进行无人驾驶汽车线控制动技术的研究,阐述了电子稳定控制系统面向无人驾驶汽车进行的软件功能拓展设计,并通过实车进行了无人驾驶汽车的各种制动工况功能测试验证。
文/王燕文 谢泽金 陈益 (上海汽车集团有限公司前瞻技术研究部)
0 引言
随着现代高科技与汽车技术相结合,无人驾驶汽车已成为当今国内外汽车业发展的热点。无人驾驶汽车是一种智能汽车,可通过车载传感器系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。
在各大厂商努力推动下,自适应巡航、前/后向主动避撞、红外夜视和自动泊车等智能化的辅助驾驶功能正在逐步成为现实。通过雷达、红外传感器、摄像头等传感器探测车辆自身周围车辆、行人或障碍物信息,对车辆驱动、制动和转向等进行辅助操作,改善了车辆的驾驶体验,实现了“人—车—路—环境”的协调控制。
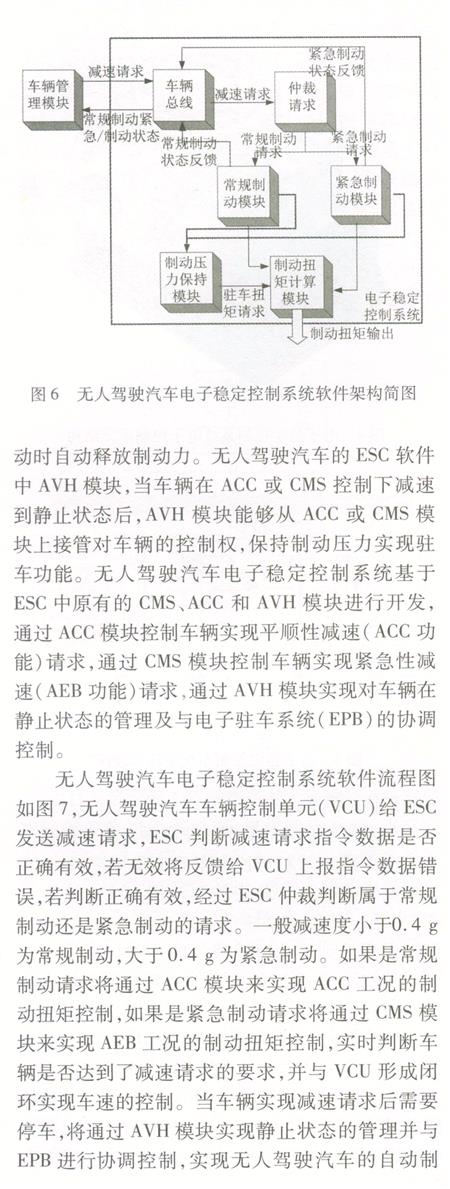
本文基于车辆稳定控制系统(ESC)实现线控制动功能的应用研究,通过开发研制控制软件算法策略,实现一种低成本、高可靠、集成化的无人驾驶汽车制动系统方案,为无人驾驶汽车制动控制系统开发设计提供范例。
1 无人驾驶汽车电子稳定控制系统组成和工作原理
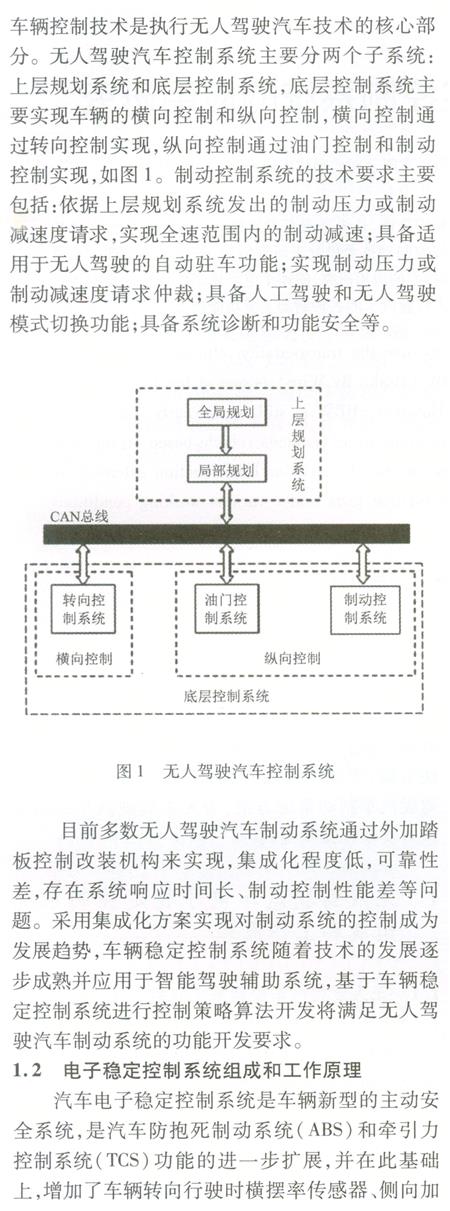
1.1无人驾驶汽车控制系统介绍
无人驾驶汽车主要由环境感知技术、智能决策技术和车辆控制技术3大关键技术组成,其中
4 结语
本文介绍了一种车辆稳定控制系统在无人驾驶汽车中的应用设计方案。该方案通过实车测试验证,制动控制效果稳定可靠,且易于实现,不仅实现了智能驾驶汽车在无人驾驶模式下自动制动的功能,而且制动系统不需要做较大的更改,实现了低成本、集成化的设计方案。