【摘要】为解决汽车驻车制动操纵机构质量超重问题,考虑刚度最大和质量最小两个目标,运用折衷规划法建立了手制动操纵机构的多目标拓扑优化数学模型,在连续体结构变密度拓扑优化方法基础上,建立了驻车制动操纵机构的有限元模型,利用Optistruct软件进行了多目标拓扑优化分析。结果表明,优化后驻车制动操纵机构刚度满足要求,质量有所减轻,并通过实际样件的耐久试验验证了此方法的可行性。
主题词:驻车制动操纵机构 多目标优化 折衷规划法
基于折衷规划法的
驻车制动操纵机构多目标优化设计
武立胜 张爱东 居刚
(安徽江淮汽车股份有限公司,合肥 230022)
1 前言
本文基于轻量化设计理念,运用拓扑优化分析方法对原汽车驻车制动操纵机构进行了多目标拓扑优化设计,在满足刚度要求的同时达到了减轻原有结构质量的目的。
2驻车制动操纵机构多目标拓扑优化模型
2.1静态多工况刚度拓扑优化目标函数
对于多种工况下的刚度拓扑优化问题常称为多刚度拓扑优化问题。驻车制动操纵机构在使用过程中承受多种载荷工况的作用,每种工况下对应一个刚度最优拓扑结构,不同工况得到不同拓扑结构,因此
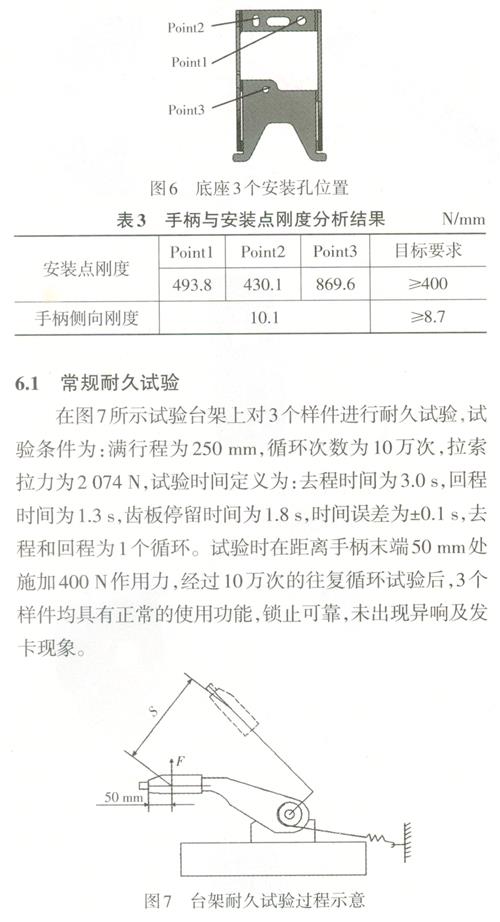
6.2过载耐久试验
利用三个样件进行过载耐久试验。试验时在拉索上加载5760N作用力,在距离手柄末端50mm处施加800N作用力,完成5次循环试验。经过5次过载试验后,3各样件均有正常的使用功能,锁止可靠,机构无开裂等不良现象。
6.3侧向刚度试验
选取3个样件进行侧向刚度试验,试验时在距离手柄末端50mm处施加100N侧向力,试验后得到3个手柄侧向位移分别为10.6mm、10.8mm、10.6mm,均满足目标要求。
7 结束语
针对驻车制动操纵机构在使用过程中的3种常见工况,建立了多工况下的刚度目标函数,同时考虑刚度和质量两个设计目标,运用折衷规划法创建了折衷的优化目标函数。运用拓扑优化技术对零件结构进行了优化,优化后零件质量减轻了约38%,刚度和强度满足设计目标要求,最后通过实际样件台架性能试验验证了次优化方案的可行性。