面向下一代智能汽车的线控制动系统解决方案:T-Booster与ESC深度耦合制动系统
1,下一代智能汽车技术变革
当前,以万物互联、大数据和人工智能等为代表技术的新一轮科技变革方兴未艾,正在引领全球制造业的全面转型升级,并引发产业格局和生态的重构。世界各工业强国面对这一变局均制定了相应的应对策略,将汽车产业作为制造业转型升级的突破口,加大科技创新力度,推动前沿技术发展。全球汽车技术进入了加速进步和融合发展的新时期,并呈现出低碳化、信息化、智能化三大发展趋势。
未来汽车技术发展方向
智能网联汽车、新能源汽车及自动驾驶汽车的核心是线控底盘技术,即线控驱动、线控转向及线控制动。线控驱动方案已经非常成熟,目前绝大部分汽车发动机或电机均提供控制接口,通过总线发送扭矩或转速控制指令即可实现线控驱动;线控转向也相对比较成熟,目前宝马及英菲尼迪某些量产车型上也已经安装使用了线控转向系统;而线控制动是底盘线控化的最大障碍,目前市场上没有成熟可靠的量产解决方案。
2,T-Booster系统
智能汽车对制动系统提出的主要需求包括:电动助力、主动制动、线控制动及失效备份等功能。为此,天津英创汇智汽车技术有限公司(以下简称“英创汇智”)研发了一款不依赖于真空源的主被动一体化电动助力制动系统(T-Booster),为新能源汽车、ADAS、自动驾驶技术等提供模块化、可扩展的制动系统解决方案,其外观如下图所示。
T-Booster三维模型
T-Booster利用电机及传动机构代替真空助力器来实现制动助力功能,通过电机来推动制动主缸活塞,可迅速建立所需的制动压力并对其进行精确调节,实现主动制动功能。与典型的ESC系统相比,T-Booster建立制动压力的速度更快,系统工作寿命更长,满足连续下长坡等需要制动系统长时间工作的工况。
2-1电动助力性能
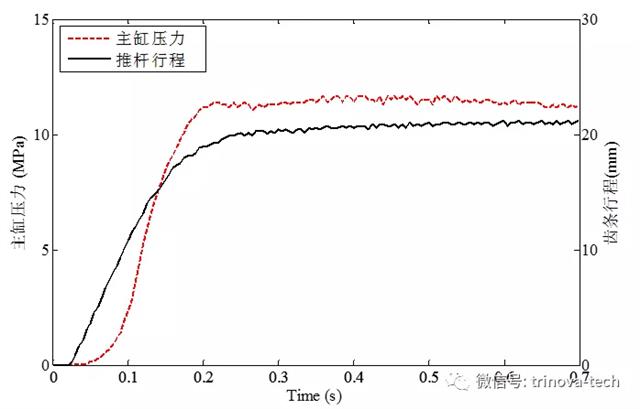
下图为人工驾驶的紧急制动工况下主缸液压的响应特性及制动推杆的行程曲线,在主缸内建立10MPa压力耗时150ms。
主缸压力-推杆行程曲线
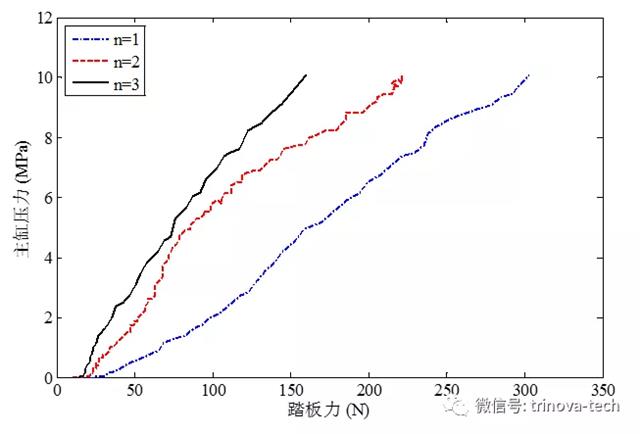
下图为不同助力比对应的主缸压力—踏板力特性,可根据不同车型及驾驶员主观意愿调整助力比,以调整制动踏板脚感。
T-Booster助力特性
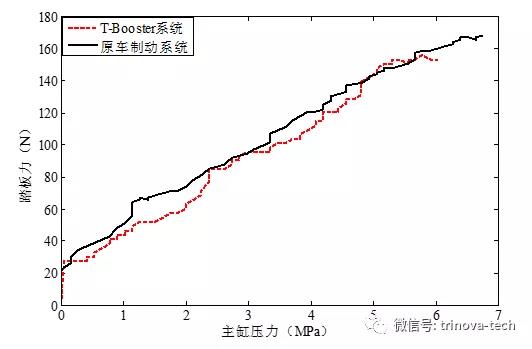
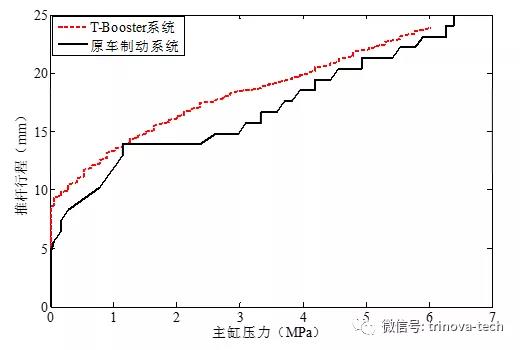
T-Booster可以通过助力控制提供接近于真空助力制动系统的踏板感觉,下图为与原车真空助力制动系统的对比。
主缸压力-踏板力曲线
主缸压力-推杆行程曲线
2-2主动制动性能
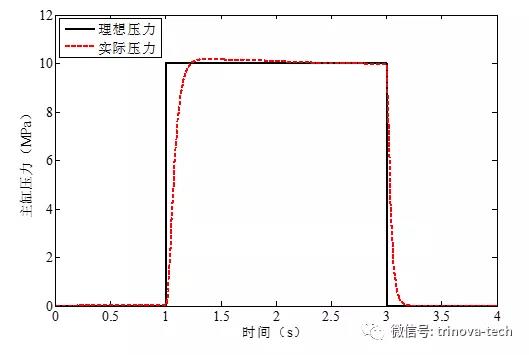
T-Booster的瞬态响应特性影响着车辆的制动安全性能,下图为T-Booster主动增压的制动主缸压力响应曲线。主缸压力从0建立至10MPa所需要的时间大约为0.2s,压力稳态跟踪误差小于0.1MPa。
主缸压力阶跃信号响应曲线
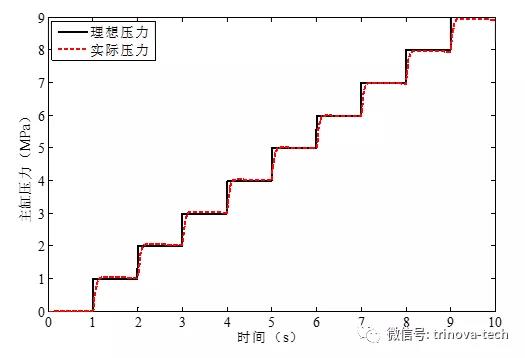
主缸压力阶梯信号响应曲线
2-3线控制动性能
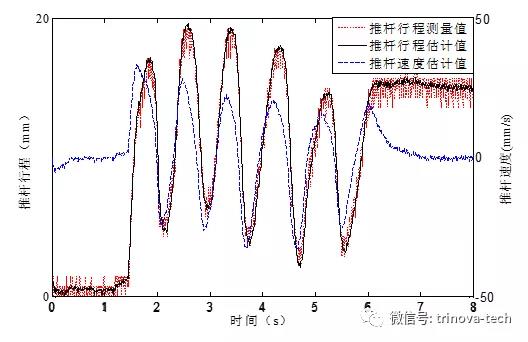
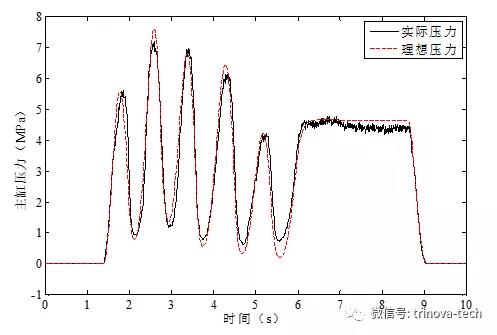
T-Booster控制器接收目标主缸压力后,解算并发送电机控制命令,实现目标制动压力的跟随控制。下图为线控制动过程中的推杆行程获取以及制动压力的跟随控制效果。在整个制动过程中,主缸实际压力始终较好的跟随理想制动压力变化。
推杆行程估计
制动压力跟随控制
2-4 T-Booster与同类产品的对比
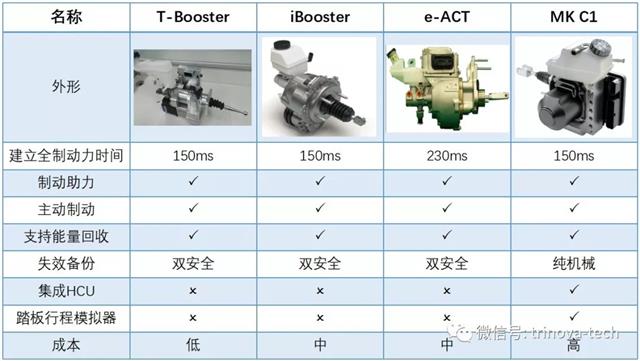
图11为英创汇智自研T-Booster与博世iBooster、日立e-ACT及大陆MK C1的产品对比图。T-Booster整体性能与其他产品相当,但成本更低,具有更大的产业化发展前景。
T-Booster与同类产品对比图
3,T-Booster与ESC耦合制动系统
3-1耦合制动系统
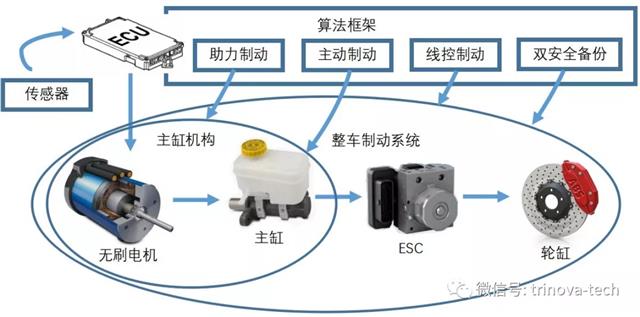
英创汇智是目前国内为数不多的具备ESC产业化能力的完全自主零部件企业,自研产品T-Booster与ESC深度耦合的线控制动系统具备更高的响应速度和控制精度,匹配费用与博世相比大幅下降。当T-Booster系统发生故障或车载电源不能满负载运行时,ESC系统可以迅速提供制动实现第一道安全失效备份;当车载电源失效时,T-Booster系统依然可以通过纯机械方式建立制动压力,实现第二道安全失效备份。图12为耦合制动系统的结构图,T-Booster可以单独实现电动助力制动及主动制动功能,T-Booster和ESC结合可以实现线控制动、制动能量回收及双安全备份制动功能。
T-Booster与ESC耦合制动系统结构图
3-2制动能量回收
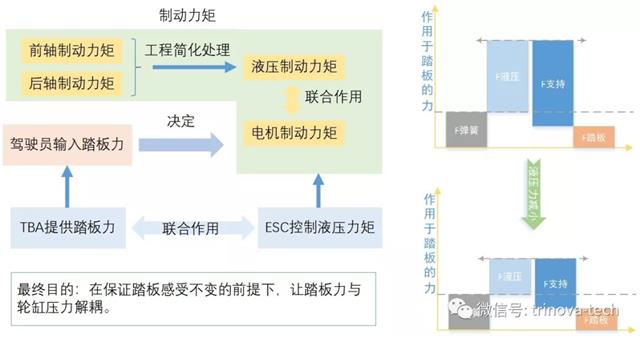
纯电动汽车或混合动力汽车在回馈制动过程中,主缸制动液暂时储存在蓄能器内,此时液压制动不介入,控制器根据踏板行程信号向电机发送相应的制动扭矩请求,实现主缸与轮缸的解耦,利用电机制动实现能量回收。若再生制动力不足以产生驾驶员所期望的制动减速度,低压蓄能器内的液压制动液将被推至制动轮缸内,此时系统工作于机电复合制动模式,并在整个制动过程中传递一致的制动踏板感觉,实现制动力的深度解耦。为了保证回收效率,将对电机制动与机械制动力矩进行解耦,实现机电复合制动的双向协调控制,如图13所示。
制动能量回收控制原理
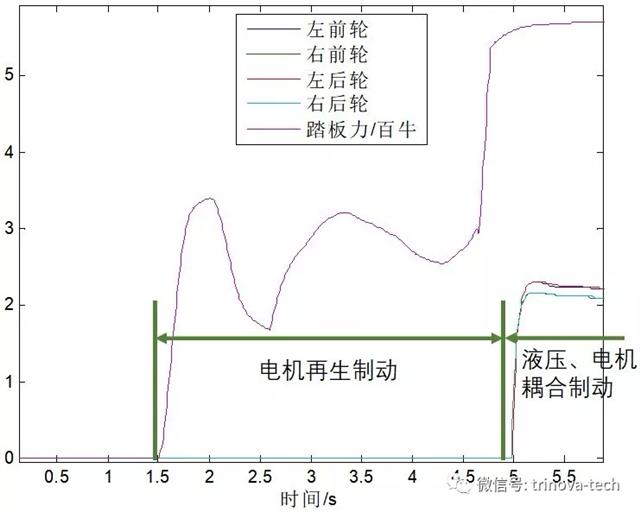
图14为T-Booster与ESC耦合制动系统制动能量回收试验曲线。图中紫色线是踏板力,当踏板力较小时,单独由电机进行回馈制动。当踏板力大于一定程度时,表示驾驶员期望制动力矩较大,电机再生制动力矩无法满足需求,此时液压制动介入。
制动能量回收试验曲线